Metoda bezpośrednia. Uzyskiwanie dyrektyw Sposób otrzymywania dyrektyw c
Podobne dokumenty
Przegląd skuteczności stosuvannya metod grzywien, szalonej optymalizacji, uzyskanych bezpośrednio i najbardziej oczywistego spadku gradientu dla rozwiązania problemu, patrząc na ekstremum (maksimum) funkcji liczby zmian dla oczywistości wymiany równości.
sterowanie robotem, dodatki 16.08.2010
Analiza twierdzeń o wyznaczaniu funkcji. Transformacja naturalna jest jak rodzina morfizmów. Charakterystyka mocy podkategorii refleksyjnych Świadomość uniwersalnych strzał. Spojrzenie na osobliwości w taki sposób, aby skłonić je do uzyskania funktorów.
praca na kursie, darowizny 27.01.2013
Metoda konwersji zawijania i її znaczenia wyższych układów algebraicznych równości. Macierz wynikowa Otrimanyi. Transformacja ortogonalna do fermentacji. Metody iteracyjne z minimalizacją niejęzyka. Decyzja przy okazji idzie prosto.
streszczenie, uzupełnienia 14.08.2009
Metody rozwoju systemów liniowych wyrównań algebraicznych, ich cechy charakterystyczne tego vіdminnі risi, osobliwości tej sfery zastosuvannya. Struktura metody ortogonalizacji i metody otrzymywania gradientów, ich różne rodzaje, etapy praktycznej realizacji.
kurs pracy, darowizny 01.10.2009
Metody numeryczne do poszukiwania szalonego ekstremum. Szef szalonej minimalizacji. Rozrahunok do minimum funkcji przez ścieżkę opadania współrzędnych. Rozwiązywanie problemów programowania liniowego metodami graficznymi i simpleksowymi. Praca z programu MathCAD.
praca na kursie, darowizny 30.04.2011
Tworząc funkcję Lagrange'a, umyj Kuhna i Tuckera. Numeryczne metody optymalizacji i schematy blokowe. Opracowanie metod funkcji kary, punktu zewnętrznego, opadania współrzędnych, uzyskiwania gradientów do zadania inteligentnej optymalizacji do szaleństwa.
praca na kursie, darowizny 27.11.2012
Model matematyczny zadania. Rewizja zadania transportowego metodą potencjalną. Wartość funkcji docelowej. System składany za 7 rubli za 8 nevіdomimi. Razvyazannya problemy metody graficznej. Widząc płaskość, która pokazuje nierówności.
sterowanie robotem, uzupełnienia 06.12.2011
Metody oceny istotności funkcji minimum jednej zmiany i funkcji wielu zmian. Opracowanie zabezpieczeń programowych do obliczania minimum lokalnego funkcji Himmelblau metodą opadania współrzędnych. Znalezienie funkcji minimalnej metodą złotego cięcia.
praca na kursie, darowizny 10.12.2009
Powtórka układów wyrównań liniowych algebry metodą prostej iteracji. Interpolacja wielomianowa funkcji metodą Newtona z podziałami. Aproksymacja RMS funkcji. Integracja numeryczna funkcji ze ścieżką Gaussa.
praca na kursie, darowizny 14.04.2009
Podstawowe informacje o metodzie simplex, ocena jej roli i znaczenia w programowaniu liniowym. Interpretacja geometryczna i sens algebraiczny. Znaczenie maksimum i minimum funkcji liniowej, zwłaszcza skarp. Rozwiązywanie problemów metodą macierzową simplex.
Metoda orientacji opiera się na kwadratowych funkcjach liczb całkowitych i jest wykorzystywana w podstawowych wynikach teoretycznych. Chociaż algorytmy, które zwyciężają w rzeczywistych sytuacjach, są skuteczne w przypadku kwadratowych funkcji liczb całkowitych, można je źle przećwiczyć w przypadku bardziej składanych funkcji liczb całkowitych, proces ten jest rozsądny.
Wizyta, umówione spotkanie. Chodź - matryca jest symetryczna do zamówienia  . Wektory
. Wektory  nazywa się
nazywa się  - pov'yazanimi, jakby smród był liniowo niezależny i zdobywał umysł
- pov'yazanimi, jakby smród był liniowo niezależny i zdobywał umysł  w
w  .
.
krupon. Spójrzmy na funkcję
Macierz jaka  możesz wziąć macierz heską
możesz wziąć macierz heską
 .
.
Jak jeden z bezpośrednich viberos  . Idź prosto
. Idź prosto  Obyś był zadowolony z zazdrości
Obyś był zadowolony z zazdrości
 .
.
Przesunięte oznaczenie, scho po'yazanі bezpośrednio vibirayutsya niejednoznacznie. Pokaż, jak dodać normatyw Umovu, można je jednoznacznie określić:
Jędrność. Bądź funkcją kwadratową  zmiany, co może być minimum, można zminimalizować za
zmiany, co może być minimum, można zminimalizować za  krokiv, aby zrozumieć, że wyszukiwanie jest prowadzone bezpośrednio w oparciu o macierz Hesse.
krokiv, aby zrozumieć, że wyszukiwanie jest prowadzone bezpośrednio w oparciu o macierz Hesse.
Wystarczającą funkcję można dobrze przedstawić na obwodzie punktu optymalnego przez przybliżenie kwadratowe. Dlatego otrzymane dyrektywy mogą być banalne dla optymalizacji її. Jednak konieczne jest więcej niżej  krokiv. W celu uzyskania bezpośrednich wyników ustala się metodę, która opiera się na utrwaleniu ofensywy.
krokiv. W celu uzyskania bezpośrednich wyników ustala się metodę, która opiera się na utrwaleniu ofensywy.
Jędrność. Niech zostanie podana funkcja kwadratowa  , dwa pełne punkty
, dwa pełne punkty  to prosteS..jak punkt
to prosteS..jak punkt  є minimalny punkt funkcji
є minimalny punkt funkcji  vzdovzh prostoSod kropki
vzdovzh prostoSod kropki  , ale
, ale  - minimalny punkt funkcji vzdovzh bezpośrednioSod kropki
- minimalny punkt funkcji vzdovzh bezpośrednioSod kropki  , a następnie bezpośrednio
, a następnie bezpośrednio  po'yazano jest prostyS.
po'yazano jest prostyS.
Algorytm
Krok 1. Ustaw punkt pąka  ten system
ten system  liniowo niezależne linie
liniowo niezależne linie  (Smród pleców może zbіgatisya z prostymi liniami osi współrzędnych).
Zminimalizuj funkcję
(Smród pleców może zbіgatisya z prostymi liniami osi współrzędnych).
Zminimalizuj funkcję  z ostatnim rosyjskim według
z ostatnim rosyjskim według  proste linie; vikoristovuyuchi jak pojedynczy poshuk; i weź punkt minimalny wcześniej jako wyjście.
proste linie; vikoristovuyuchi jak pojedynczy poshuk; i weź punkt minimalny wcześniej jako wyjście.
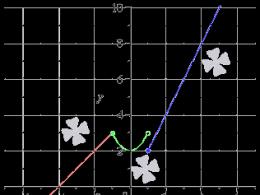
Krok 2 Vikonati dodatkovy krok  , co oznacza całkowity ruch na krótkim 1. Oblicz punkt
, co oznacza całkowity ruch na krótkim 1. Oblicz punkt  (Rysunek 12). Zrewiduj kryterium (*) wprowadzania nowego bezpośrednio do systemu wpływów bezpośrednich.
(Rysunek 12). Zrewiduj kryterium (*) wprowadzania nowego bezpośrednio do systemu wpływów bezpośrednich.
Krok 3 Daj spokój  – największa zmiana funkcji celu w jednym z kierunków
– największa zmiana funkcji celu w jednym z kierunków  :
:

і  є bezpośrednio, scho vіdpovidaє
є bezpośrednio, scho vіdpovidaє  .
.
Umyj swój umysł
 (*)
(*)
następnie wyszukaj, aby kontynuować vzdovzh cob direct  od kropki
od kropki  lub
lub  (3 punkty, mniej wartości funkcji).
(3 punkty, mniej wartości funkcji).

Krok 4 Yakscho
zmyć  nie wygrywaj, a następnie zminimalizuj funkcję
nie wygrywaj, a następnie zminimalizuj funkcję  vzdovzh prosto
vzdovzh prosto  . Przyjmij punkt tego minimum, jak pochatkov na etapie ofensywnym. Na jakim etapie bezpośrednio pokonać system
. Przyjmij punkt tego minimum, jak pochatkov na etapie ofensywnym. Na jakim etapie bezpośrednio pokonać system
Tobto. prosto  zamiennik dla
zamiennik dla  , yake miejsce w pozostałej części matrycy bezpośrednio.
, yake miejsce w pozostałej części matrycy bezpośrednio.
Krok 5. Yakscho  , to zostanie znalezione minimum. W przeciwnym razie podążaj za Croc 1.
, to zostanie znalezione minimum. W przeciwnym razie podążaj za Croc 1.
krupon. Klikając ikonę, Mathcad otwiera dokument przy użyciu metody bezpośredniego wyniku, której można użyć do obliczenia.


Minimalizacja funkcji
metoda bezpośrednia
Nieracjonalne może być oglądanie następnej iteracji bezpośredniego przepływu i instalowanie nowych perspektyw bezpośrednio w pozostałej części miesiąca w celu zastąpienia pierwszej. Nie ma jednak znaczenia, że ten najbardziej dalekosiężny jest wprost lepszy do wszystkiego, a nowy obiecujący bezpośrednio zwycięża w jednokierunkowej optymalizacji i stosovuvaty yoga od razu i nie ma sensu, po prostu nie będzie żadnego poślizgu poprzez.
Powell powiedział, że arbiter macierzowy również bezpośrednio uzyskuje wartość maksymalną i tylko raz, jeśli jest bezpośredni  ,
, powiązany z macierzą Hesji. W dіyshov vysnovku, scho scho bezpośrednio povymіschennya maіє zamenuvaty z przodu mniej w tym przypadku, jeśli bezpośrednio zbіlshuє vyznachnik matrix nіrіkіv, oskіlki tіlki tіlki nіvі nіr nabіv nіtivаk.
powiązany z macierzą Hesji. W dіyshov vysnovku, scho scho bezpośrednio povymіschennya maіє zamenuvaty z przodu mniej w tym przypadku, jeśli bezpośrednio zbіlshuє vyznachnik matrix nіrіkіv, oskіlki tіlki tіlki nіvі nіr nabіv nіtivаk.
Wykazano, że procedura Powella dochodzi do punktu, w którym gradient osiąga zero, co oznacza, że funkcja celu wypukłości. Punkt Tsya to lokalne minimum. Metoda ta jest bardziej czuła na metodę wywoływania bezpośrednich dyrektyw i polega na dokładności zwycięskiego poszukiwania jednego świata. Powella, propagując sekwencję interpolacji kwadratowych za pomocą specjalnej procedury dostosowania parametrów przeszukiwania liniowego. Badania numeryczne wykazały, że metoda Powella uzyskiwania bezpośrednich wyników nie wygrała ponad 20.
Metody najbardziej widocznego opadania oraz opadania wzdłuż współrzędnych w celu nawigacji dla funkcji kwadratowej wymagają nieskończonej liczby iteracji. Jednak możliwe jest wywołanie takiego bezpośredniego zejścia, jak dla funkcji kwadratowej
- (3.12)
- (De r є n-world vector) z symetryczną dodatnio przypisaną macierzą A, proces opadania przebiega dokładnie do minimum dla ostatniej liczby kroków.
Macierz dodatnio równa pozwala nam wprowadzić normę wektora w następującej kolejności:
Wartość (3.13) oznacza, że przy skalarnym tworzeniu dwóch wektorów x wartość (x, Ay) jest teraz zrozumiana. Wektory prostopadłe do sensu tworzenia skalarnego
(x, Ay) = 0 (3,14)
są nazywane uzyskanymi (setki razy podane przez macierz A).
Na tym została oparta duża grupa metod: otrzymywanie gradientów, otrzymywanie metod bezpośrednich, metod równoległych i inne.
W przypadku funkcji kwadratowej smród zwycięża z takim samym sukcesem. W przypadku wystarczającej funkcji lepiej jest zrozumieć metodę uzyskiwania bezpośredniego, dla której szczegółowo algorytm jest zdecydowanie wybierany.
Na grzbiecie dłoni widzimy, jak tę metodę można uzupełnić do formy kwadratowej (3.12). Dla kogo potrzebujemy diakonów mocy z otrzymanych wektorów.
Przejdźmy do układu wektorów otrzymanych parami x i. Normalizacja skóry z tych wektorów y sensi norm (3.14)
Wiedzmy, że wektory i wektory liniowo niezależne są ze sobą powiązane. Z rivnosti
nałożyć pozytywne znaczenie macierzy. Tse protirichcha, aby przynieść naszą jędrność. Również system n-otrzymanych wektorów jest podstawą przestrzeni n-światów. Dla tej matrycy istnieją bazy bezosobowe, które tworzą wzajemnie powiązane wektory.
Daj mi znać kilka koniugacji o podstawie x i, 1 cal. Wybierzmy wystarczający punkt r0. Wszelkie ruh z punktu tsієї można rozłożyć zgodnie z wynikową podstawą

Podstawiając odpowiednią część formuły (3.12), możemy przekształcić ją w celu poprawy sukcesu bazy (3.15) na formę ofensywną:
Reszta sumy składa się z terminów, a dla każdego z nich dodawany jest tylko jeden składnik sumy (3.16). Tse oznacza, że ruh jeden po drugim s otrzymane bezpośrednio x i zmienia tylko jeden składnik sumy (3.17), bez ingerencji w inne.
Obliczamy od punktów r 0 zjazdów pochergovі do minimum na skórze otrzymanej bezpośrednio x i . Zejście skóry minimalizuje jej termin sumy (3.17), więc minimum funkcji kwadratowej jest osiągane dokładnie po przekroczeniu jednego cyklu zejść, czyli dla ostatniej liczby zjazdów.
Podstawę można uzyskać metodą równoległych płaszczyzn kropkowanych.
Niech diakaa będzie prosta równoległa do wektora x, a funkcja kwadratowa osiągnie linię prostą o wartości minimalnej w punkcie r 0 . Przedstawmy wyrównanie linii prostej r = r 0 + bx y viraz (3.12)
c(b) \u003d F (r 0) + b 2 + b (x, 2Ar 0 + b),
i możliwe jest (dц/dб) b-0 = 0. Zvіdsi viplivaє іvnyannya, co odpowiada punktowi minimalnemu:
(x, 2Ar 0 + b) = 0. (3.18)
Przejdź do następnej prostej równoległej do pierwszej, funkcja przyjmuje wartość minimalną w punkcie r 1 ; wtedy podobnie wiemy (x, 2Ar 1 + b) = 0. Biorąc pod uwagę równość h (3.18), bierzemy
(x, A(r 1 r 0)) = 0. (3.19)
Otzhe, bezpośrednio, który łączy punkty do minimum na dwóch równoległych liniach, połączonych bezpośrednio z tymi liniami.
W ten sposób zawsze możesz indukować wektor, który pasuje do wystarczającego zadanego wektora x. Komu wystarczy narysować dwie proste równoległe do x i znać na skórze proste minimum postaci kwadratowej (3.12). Wektor r 1 r 0 Z poważaniem, że linia jest bezpośrednio wyrównana z tymi punktami, funkcja de na tej linii ma wartość minimalną; іz tsim pov'azana nazwa metody.
Niech dwie równoległe m-wymiarowe płaszczyzny generowane przez układ otrzymanych wektorów х i , 1 imn. Niech funkcja kwadratowa osiągnie swoją minimalną wartość w tych płaszczyznach wyraźnie w punktach r 0 i r 1 . Podobne mirkuvannyami mogą przynieść, wektor scho r 1 r 0 z'єdnuє minimum punktowe, po'yazaniya z usima wektory x i . Ponadto, skoro dany jest nierówny układ otrzymywania wektorów x i, to w ten sposób zawsze można indukować wektor r 1 r 0, pasujący do wszystkich wektorów układu.
Przyjrzyjmy się jednemu cyklowi procesu indukcji uzyskanej bazy. Niech indukcja będzie podstawą, dla której pozostałe m wektorów są wzajemnie powiązane, a pierwsze n-m wektorów nie są powiązane z pozostałymi. Znamy minimum funkcji kwadratowej (3.12) dla m-wymiarowej płaszczyzny generowanej przez pozostałe m-wektory do bazy. Wektory Oskіlki qi i wzajemnie połączone, dla których wystarczy wybrać punkt r 0 i pracować z niego zejście wzdłuż linii ze skóry z tsikh bezpośrednio (do minimum). Punkt minimum w pobliżu tej płaszczyzny jest znaczący poprzez r 1 .
Teraz z punktów r 1 możemy krok po kroku schodzić po pierwszych n - m wektorach do bazy. To zejście poprowadzi trajektorię z pierwszej płaszczyzny i doprowadzi ją do punktu śpiewu r 2 . Od punktu r 2 ponownie, po pozostałych prostych m zjazd, który prowadzi do punktu r 3 . To zejście oznacza dokładnie minimum na drugiej płaszczyźnie, równoległej do pierwszej płaszczyzny. Ponownie, bezpośrednio r 3 - r 1 jest powiązane z pozostałymi m wektorami do bazy.
Jeśli jedna z niesprzężonych linii w bazie zostanie bezpośrednio zastąpiona przez r 3 - r 1, to nowa baza już m + 1 będzie bezpośrednio ze sobą powiązana.
Pochnemo rozrahunok tsiklіv іz podstawa dovіlnogo; Musisz wiedzieć, że m=1. Opisy procesów na cykl zwiększają o jeden liczbę otrzymanych wektorów z bazy. Później, w n - 1 cyklach, wektory do bazy zostają otrzymane, a kolejny cykl sprowadza trajektorię do punktu minimum funkcji kwadratowej (3.12).
Aby zrozumieć uzyskaną bazę, jest ona przypisana tylko do funkcji kwadratowej, ale opisy procesu indukcji są bardziej, że można go formalnie opisać dla funkcji wystarczającej. Jest oczywiste, że w swoim minimum wymaga bezpośrednio parabol, a nie wikorystycznej liczby formuł, ale z określonym typem funkcji kwadratowej (3.12).
W małym sąsiedztwie minimum zwiększania funkcji gładkiej brzmi jak symetryczna, dodatnio przypisana forma kwadratowa do typu (3.2). Jeśli wygląd był dokładny, metoda uzyskiwania bezpośrednio zbiegała się dla ostatniej liczby kroksów. Jeżeli manifestacja jest przybliżona, to liczba krokówv będzie niewyczerpana; Metoda Prote zbіzhnist tsgogo w pobliżu minimum będzie kwadratowa.
Metoda kwadratowej skuteczności uzyskiwania Zavdyaki bezpośrednio pozwala poznać co najmniej wysoką dokładność. Metody liniowych zbіzhnistyu zzvichayut ekstremalnych wartości współrzędnych mniej dokładnie.
Metoda bezpośredniego pozyskiwania jest być może najskuteczniejszą metodą zejścia. Wina są nieźle praktykowane w przypadku minimum wirogenności, w przypadku róż, a ze względu na obecność w reliefie słabo kruchych drzew - "plateau", a dla dużej liczby zmian - do dwóch tuzinów.
BEZPOŚREDNIO ODKRYTY
Para linii prostych, które wychodzą z punktu Рsurface Sі tak, że ich linie proste są uzyskiwane przez średnice wskaźnika Dupina powierzchni Svtochtsі R. W celu wyprostowania ( du:dv), dodatkowo Rsurface Sbuli S. n., konieczne i wystarczające do prania
de L, Mі N- współczynniki innej kwadratowej postaci powierzchni S, obliczona w punkcie R. Zastosować: linie asymptotyczne, linie podstawowe.
Oświetlony.: Pogorelov A. St., Dyferencjał, wydanie 5., M., 1969.
. V. Szykina.
Encyklopedia matematyczna. - M: Encyklopedia Radiańska. I. M. Winogradow. 1977-1985.
Zobacz, co oznacza „BEZPOŚREDNIO ZAMÓWIENIE” w innych słownikach:
Geometria Razdіl, w której geometria. obraz, nasamperowane krzywe i powierzchnie metodami matematycznymi. analiza. Zadzwoń pod numer D.r. moc krzywizny i nad maleńkim wznosi się, więc moc mocy jest na pewno mała. Co więcej, w ... Encyklopedia matematyczna
1) Suma kwadratów dożynów uzyskanych z pvśrednic elipsy jest wartością stałą, która jest droższa niż suma kwadratów dożynów elipsy. 2) Obszar równoległoboku opisany w następujący sposób, którego boki można wiązać prosto, prosto i stabilnie ... Encyklopedia matematyczna
Bezpośrednio na powierzchni regularnej, karbowanej, krzywizna normalnego wcięcia powierzchni jest równa zeru. Aby bezpośrednio w punkcie Rbulo A. n., konieczne i wystarczające jest zrozumienie: de współrzędne wewnętrzne na powierzchni oraz L, M i N. Encyklopedia matematyczna
Metody numeryczne podziału matematyki obliczeniowej, zadania do matematyki. opis dalszych procesów numerycznego opracowywania zagadnień algebry liniowej. Środkowa głowa L. a. Najistotniejsze mogą być dwa: rozwiązanie układu algebry liniowej. rivnyan… … Encyklopedia matematyczna
Linie Merezha na powierzchni, wysadzane dwiema rodzinami linii tak, że w skórze punkty linii powierzchni linii różnych rodzin mogą być bezpośrednio połączone. Jeśli miarą współrzędnych jest є C. s., to współczynnik M jest inną postacią kwadratową. Encyklopedia matematyczna
Z 34.21.308-2005: Hydrotechnika. Podstawowa znajomość. warunki i definicje- Terminologia Z 34.21.308 2005: Hydrotechnika. Podstawowa znajomość. Terminy i przeznaczenie: 3.10.28 Port: Wodny akwen w górnej części hydroelektrowni otoczony jest zaporami niskiego stopnia, zabezpieczony budynkami cumowniczymi i jest uznawany za noclegi... Słowniczek pojęć dla dokumentacji normatywnej i technicznej
I I. Historia rozwoju lotniska. Otóż drogi, patrząc, jak jest teraz, nie od razu jej nie znaleziono. Trzy elementy, її magazynowanie, grabie, transport towarów i energia, przeszły etap rozwoju poprawiający skórę. Słownik encyklopedyczny F.A. Brockhaus i I.A. Efron
Lista płac- (Płace) Najważniejszy wkład w promocję zatrudnienia robotników Los robotników w części nowopowstałego błogosławieństwa materialnego i duchowego Zmist Zmist. > aktualności - najważniejszy zasib promocji zatsіkavlenosti ... ... Encyklopedia inwestora
Dywersyfikacja- (Dywersyfikacja) Dywersyfikacja kosztów inwestycji ukierunkowanie na ograniczenie rynków finansowych Encyklopedia inwestora
XIII. Zrób wnętrze (1866-1871). 4 kwietnia 1866 roku, w czwartą rocznicę tego dnia, cesarz Ołeksandr, po wspaniałym spacerze w Ogrodzie Letnim, siedząc na vozoku, jeśli mężczyzny nie było w domu, strzelał z nowego pistoletu. Wu qiu hvilinu, sho stojąc przy ... Wielka encyklopedia biograficzna
Krok 1. Ustaw punkt kolby x(0) ten system n linie liniowo niezależne; sprawny fizycznie, jeśli s(i) = e(i) i = 1, 2, 3,..., N.
Krok 2. Minimalizuj f(x) pod ostatnim rosyjskim ( n+1) linie proste; kiedy punkt jest brany wcześniej, punkt minimalny jest traktowany jako vihidna, ale prosta s(N) vikoristovuetsya jak za pierwszym, a reszta żartu.
Krok 3. Znaczenie nowych sukcesów bezpośrednio dla dodatkowej ograniczonej mocy podprzestrzeni równoległej.
Krok 4. Zamień s(l) wł s(2) itd. Wymień s (N) zwiążemy to prosto. Idź do Croc 2.
Aby zastosować metodę w praktyce konieczne jest jej uzupełnienie o procedury sprawdzania skuteczności i niezależności liniowej układu bezpośredniego. Ponowna weryfikacja niezależności liniowej jest szczególnie ważna w przypadku spadków, jeśli funkcja f(x) nie kwadratowy.
W pewnym sensie zachęcić algorytm, aby zobaczył, co robi, jeśli funkcja celu jest kwadratowa i może wynosić co najmniej punkt minimum w wyniku implementacji n cykle zawierające sekcje 2, 3 i 4, de n- Kіlkіst zminnikh. Ponieważ funkcja nie jest kwadratowa, potrzeba więcej i mniej n cykle. Jednocześnie możemy dać doskonały dowód, że przy pewnych założeniach metoda Powella zbiega się do punktu lokalnego minimum. superliniowy shvidkіstyu (dział podany poniżej terminu).
Shvidkіst zbіzhnostі. Metoda look-ahead pozwala na wywołanie sekwencji punktów x(k), jak zbliżyć się do rozwiązania x*. Metoda nazywa się podobny jak niespójność
≤ 1, de (3.39)
= x - X *, (3.40)
iteracje skórne są zwycięskie. Oskіlki pіd h rozrahunkіv zazvichiyut działają z końcowymi ułamkami dziesiętnymi, stanowiąc najbardziej wydajny algorytm do przeprowadzania nieistotnej sekwencji iteracji. Dlatego interesuje nas przedstawienie asymptotycznej siły opłacalności opracowywanych metod. Mówimy, że algorytm może być w porządku r(div.), yakscho
 , (3.41)
, (3.41)
de W- Stała wartość. 3 formuły (3.39) r\u003d 1maє mgła nierówność Z ≤ 1. Yakscho r= 1abo r= 2, to algorytm jest scharakteryzowany liniowy lub prędkość kwadratowa oczywiście. Na r= 1і W= 0 algorytm jest scharakteryzowany superliniowy shvidkіstyu zbіzhnostі.
Przykład 3.6. Metoda bezpośrednia Powella
Znajdź minimalny punkt funkcji
f(x) = 2x + 4x x – 10x x+ x,
tak długo, jak ustawiony jest punkt kolby x(0) = T , w yakіy F(x (0)) = 314.
Krok 1. s(1) = T , s(2) = T.
Krok 2. (a) Znamy wartość λ, dla której
F (x (0) + λ s(2)) → min.
Bierzemy: λ* - 0,81, gwiazdki
x(l) = T - 0,81 T = T, F(x(l)) = 250.
(b) Znamy wartość λ dla której F (x(1) + λ s(1)) → min.
λ* = – 3,26, x (2) = T,F(x (2)) = 1.10.
(c) Znamy wartość λ, dla której F (x(2) +λ s(2)) → min.
λ* = – 0.098, x (3) = T,F(x (3)) = 0.72.
Krok 3. Zróbmy to s (3) = x (3) - x (1) = [-3.26,-0.098]T. Po wykonaniu normalizacji
s (3) = = [– 0,99955, – 0,03]T.
Postawmy s(1) = s(2) , s(2) = s(3) i przejdźmy do sekcji 2 algorytmu.
Krok 4. Znamy taką wartość λ, dla której F (x(3) +λ s(2)) → min.
λ* = – 0.734, x (4) = T,F(x (4)) = – 2,86.
Notatka. Jakby f(x) buła jest funkcją kwadratową, wtedy punkt buła został odjęty od zadania (jakby nie dopuścić do ułaskawienia zaokrąglenia). W momencie iteracji kolejnym krokiem jest kontynuowanie do końca decyzji.
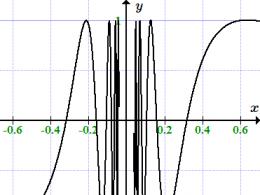
Kierunki poszukiwań, zaczerpnięte z procesu wdrażania metody, przedstawiono na ryc. 3.13.
Wyniki eksperymentów numerycznych pozwalają potwierdzić, że metoda Powella (dodatki metodą bezpośredniej ponownej weryfikacji odłogów liniowych) jest uważana za najmniejszą z najwyższej wiarygodności, a także metodę badań bezpośrednich, a w szereg odchyleń, jest to znaczące. Dlatego problem wyboru algorytmu wyszukiwania bezpośredniego jest często (i ugruntowywany) w stosunku do metody Powella.
Na tym kończy się przegląd metod bezpośredniego poszukiwania rozwiązania zadania szalonej optymalizacji. W dywizji atakującej opisane są metody oparte na zwycięstwach tej ostatniej.
metody gradientowe
Na froncie podziału przyjrzano się metodom pozwalającym określić rozkład zadań na podstawie wyboru wartości funkcji celu. Znaczenie metod bezpośrednich jest niewątpliwe, a informacja o znaczeniu funkcji celu jest jedyną istotną informacją w wielu praktycznych zadaniach inżynierskich, co może mieć miejsce.
f(x) = 2x + 4x x – 10x x+ x

Ryż. 3.13. Wyprowadzenie problemów z dolnika 3.6 metodą bezpośrednią Powella.
Z drugiej strony, przy najskuteczniejszych metodach bezpośrednich rozwiązania problemu, czasami konieczne jest obliczenie wartości funkcji w bardzo dużej ilości. Sytuacja Tsya jest porządkiem całego naturalnego ćwiczenia, aby uświadomić sobie możliwość znaczenia punktów stacjonarnych [tj. tj. punkt, który zadowala niezbędne umysły pierwszego rzędu (3.15a)], aby należycie rozważyć metody, które są oparte na zmiennym gradiencie funkcji. Wyznaczone metody, które mają charakter iteracyjny, odłamki składowych gradientu są pokazane przez nieliniowe funkcje zmian utwardzania.
Dali skrіz perebachaetsya, scho f(x), f(x)і f(x)іsnuyt bez przerwy. Metody vikoristannyam jako pierwsze, a także inne podobne, są rozważane tylko krótko i jako rangą głowy w związku z bardziej brązowymi metodami. Szczególny szacunek przywiązuje się do sprawozdania z metod otrzymane gradienty, Opierają się one na wprowadzeniu wyższego rozumienia sukcesu bezpośrednio oraz o metodach quasi-newtonowskich, zbliżonych do metody Newtona, a jedynie informacje o tych pierwszych ostatnich. Sugeruje się, aby składowe gradientu można było zapisać w postaci analitycznej lub z dużą dokładnością obliczeniową z wykorzystaniem dodatkowych metod numerycznych. Ponadto rozważane są metody numerycznej aproksymacji gradientów.
x = x +α s(x) (3.42)
de x- bliżej rozwiązania X *; α - parametr charakteryzuje długość plonu; s(x) = s- idź prosto do N-spokojny otwarte przestrzenie x ja , ja = 1, 2, 3,..., n.Metoda oznaczania s(x) i α na skórze iteracja opatrunków z właściwościami metody, którą należy ustalić. Wibracja dźwięku α zdіysnyuєtsya za pomocą zadań virіshennyaі minimіzatsії f(x) prosto s(x). Dlatego przy wdrażaniu opracowywanych metod konieczne jest opracowanie wydajnych algorytmów jednowymiarowej minimalizacji.
3.3.1. Metoda Cauchy'ego
Powiedzmy, że punkt śpiewania przestrzeni zmieniających się zmian należy bezpośrednio przypisać najbardziej widoczne lokalne zejście, tak aby największa lokalna zmiana funkcji celu. Tak jak poprzednio, rozkładamy funkcję na obrzeża punktu y Taylor Row
f(x) = f()+ f() ∆x+… (3.43)
i członków v_dkinemo z innej kolejności niż więcej. Nie ma znaczenia, czy lokalnie zmieniona funkcja celu jest określona przez inny dodatek, odłamki wartości F() naprawiony. Największa zmiana F wiąże się z wyborem takiej bezpośredniej (3.42), która jest najbardziej negatywny wartość kreacji skalarnej, która pojawia się jako kolejny dodatek do układu. Z jakości kreacji skalarnej widzimy, że oznaczenia wibratora są bezpieczne, gdy
s() = - F(),(3.44)
i jeszcze dodanok w przyszłości zobaczę
–α F() F().
Rzut oka na ugory w kierunku najbardziej widocznego lokalnego zejścia. Dlatego w podstawie najprostsza metoda gradientowa kłamstwo formuła
x = x -α F(x), (3.45)
de - przypisania jest parametrem dodatnim. Metoda może mieć dwie wady: po pierwsze winić konieczność doboru odpowiedniej wartości α , i w inny sposób metoda potęgi wystarcza, aby po małości zwiększyć się do punktu minimum F na obrzeżach punktu.
W ten sposób, aby przypisać wartość α do iteracji skóry
x = x -α F(x), (3.46)
Wartość α oblicza się na podstawie zadania minimalizacji F (x(k +1)) prosto F(x) o pomoc w innej metodzie przeszukiwania jednego świata. Metoda gradientu spojrzonego nazywana jest metodą najbardziej widocznego opadania lub metoda Cauchy'ego, oskіlki Koshі pierwszy zwycięzca, który stworzył podobny algorytm do implementacji systemów linii liniowych.
Poshuk uzdovzh wprost do wzoru (3.46) zapewnia większą przewagę metody Cauchy'ego w porównaniu z najprostszą metodą gradientową, prostota opłacalności Yogo w przypadku niskich zadań praktycznych jest niedopuszczalnie niska. Jako całość rozumiano, że odłamki zmian będą leżeć bez środka w wielkości gradientu, jak zero w pobliżu punktu minimum, a na pozostałych nie ma mechanizmu przyspieszającego zapadanie się do punktu minimum. iteracje. Jedną z głównych zalet metody Koshi jest jej stіykіstyu. Metoda jest ważna dla mocy, ponieważ ma zapewnić, że gdy skończysz małą ilość czasu, iteracja zapewni, że nie będzie nerwowości
F (x) ≤ F (x). (3.47)
Należy pamiętać, że metoda Cauchy'ego z reguły pozwala na zmianę wartości funkcji celu po raz pierwszy w danym punkcie, rozkładając się na znaczące punkty w punkcie minimum, co często jest zwycięskie podczas realizacja stopni. Nareshti za pomocą metody Cauchy'ego można zademonstrować kilka podejść, jak zaangażować się w implementację różnych algorytmów gradientowych.
Przykład 3.7. Metoda Cauchy'ego
Spójrzmy na funkcję
f(x) = 8x + 4xx + 5x
oraz metoda vikoristovuєmo Cauchy'ego dla rozwiązania problemu i minimalizacji її.
Rozwiązanie. Następnie obliczalne składowe gradientu
= 16x + 4x, = 10x + 4x.
Aby zatrzymać metodę jak najbardziej widocznego opadania, przystawiamy kolbę bliżej
x (0) = T
i za pomocą wzoru (3.46) nowe przybliżenie
x = x-α F(x)
f(x) = 8x + 4xx + 5x

Ryż. 3.14. Iteracje metodą Cauchy'ego z dodatkową metodą interpolacji kwadratowej.
Tabela 3.1.Oblicz wyniki metodą Cauchy'ego
| k | x | x | f(x) |
| 1 | -1.2403 | 2.1181 | 24.2300 |
| 2 | 0.1441 | 0.1447 | 0.3540 |
| 3 | -0.0181 | 0.0309 | 0.0052 |
| 4 | 0.0021 | 0.0021 | 0.0000 |
Viberomo α w taki sposób, że F (x(1)) → min.; α = 0,056. Otzhe, x (1) = [– 1,20, 2.16]T Poznajmy o co chodzi
x = x -α F(x),
obliczanie nachylenia w punkcie x i provіvshi poshuk vzdovzh prosto.
Tabela 3.1 przedstawia dane, odejmując godzinę iteracji od poprawy pojedynczego wyszukiwania metodą interpolacji kwadratowej. Kolejność zdobywania punktów pokazano na ryc. 3.14.
Niezależnie od tych, dla których metoda Cauchy'ego nie ma dużego praktycznego znaczenia, zaimplementujemy najważniejsze metody małogradientowe. Schemat blokowy algorytmu Cauchy'ego przedstawiono na ryc. 3.15. Z szacunkiem, algorytm robota kończy się, jeśli moduł gradientu lub moduł wektora x zacznij dosit malim.

Ryż. 3.15. Schemat blokowy dla metody Cauchy'ego.
3.3.2. metoda Newtona
Nie ma znaczenia, jaka jest najlepsza strategia lokalna w poszukiwaniu najlepszego gradientu w metodzie Kosh. Jednak kierunek prostej, przeciwny gradient, z mniejszym prawdopodobieństwem doprowadzi do punktu minimum w tym kierunku, jeśli proste funkcji są równe F stanowią stawkę. W takim szeregu, dokładnie naprzeciw gradientu, wydaje się wyglądać, nie możesz być miły? światowy bezpośrednio szukać optymalnego punktu funkcji nieliniowych. Metoda Cauchy'ego opiera się na ostatniej liniowej aproksymacji funkcji celu i oblicza wartość funkcji oraz pierwszą podobną w iteracji skóry. Aby zainspirować większą strategię badawczą, powinieneś także uzyskać informacje o innych ważnych funkcjach celu.
Rozwińmy funkcję liczb całkowitych w szereg Taylora
f(x)=f(x)+ f(x) ∆x+½∆x f(x)∆x+O(∆x³).
Biorąc pod uwagę wszystkie warunki układu trzeciego rzędu i więcej, przyjmujemy przybliżenie kwadratowe f(x):
(x; x) = f(x) + f(x ) T ∆x + ½∆x f(x)∆x,(3.48)
de (x;x)- funkcja przybliżająca serpentynowy X, monit w punkcie x. Na podstawie przybliżenia kwadratowego funkcji f(x) utworzymy ciąg iteracji w takiej kolejności, aby w tym momencie znów zostałem opętany. x gradient przybliżanie funkcja powraca do zera. Maymo
(x; x) = + f(x)+ f(x) = 0, (3.49)