Ortogonālās vektoru sistēmas. Telpas orientācijas novērtējums jeb Jaks nebaidās no Mahona un Majvik filtriem02/04/2019
1) O. take, sho (x a , x ab) = 0 . Tāpēc ādas vektora norma ir vienāda ar vienu, tad sistēmas (x a) skaņa. ortonormāls. Povna O. s. (x a) skaņa ortogonāls (ortonormāls) pamats. M.I. Vojcehovskis.
2) O. s. koordinātas - koordinātu sistēma, un, ja koordinātu līnijas (vai virsma) ir ietonētas zem taisna griezuma. O. s. koordinātes atrodamas noteiktā eiklīda telpā, ale, vzagali šķietami, nav atrodamas pietiekamā telpā. Divu pasauļu gludajā Atēnu plašumā O. s. jūs vienmēr varat ievadīt nelielu laukumu ap ādas punktu. Indija var ieviest O. s. koordinātas labajā pusē. In O. ar. metriska tenzors g ij diagonāles; diagonālās sastāvdaļas gii pieņemts sv. Lamy koeficienti. Lami koeficients O. s. telpā tiek izteiktas ar formulām

de x, yі z- Taisnstūra Dekarta koordinātas. Ar Lame koeficientiem tiek izteikts dozhini elements:
virsmas laukuma elements:
skaļuma elements:
vektoru diferenciālās operācijas:

Lielākā daļa vikoristovuvani O. s. koordinātas: plaknē - dekarta, polāra, eliptiska, paraboliska; telpā - sfērisks, cilindrisks, parabolisks, bicilindrisks, bipolārs. D. D. Sokolovs.
3) O. s. funkcijas - kіntseva chi lіchlna sistēma (j i(x)) funkcijas, kas ir atvērtas
L2(X, S, m) kas apmierina prātus
Jakšo l i= 1 visiem es, tad skaņas sistēma ortonormāls. Pārnesot, pasaule m(x) tiek piešķirta X s-algebrai Spіdreizinātājam, tā ir lihāli aditīva, ir vienāda un ir lichilnu bāze. Tse vyznachennya O. s. iekļauj visas analīzes O. s. ikdienas analīzē; smirdēt iznāk ar dažādām specifiskām pasaules plašuma realizācijām ( X, S, m).
Vislielākā interese varētu būt par sistēmas ortonormalizāciju (j n(x)), ko izmantot šo jaudu, kādai funkcijai ir viena rinda, ko iet uz f (x) metriskajā telpā L2(X, S, m) ,
pie kura koeficienta s n nosaka Four'e formulas
![]()
Šādas sistēmas ir balstītas uz telpas atdalāmību L2(X, S, m). Universāla metode jaunu ortonormālu sistēmu ierosināšanai sniedz Šmita ortogonalizācijas metodi. Kuram pietiek atkal nosmacēt jogu uz deako L2(S, X, m) lineāri neatkarīgu funkciju sistēma.
Teorētiski ortogonālas rindas O. s. plašumsLva L2[a, b](tad okremy vipadok, ja X =[a, b], S- reizinājumu sistēma, kas ir līdzsvarota saskaņā ar Lebesgue, un m - Lebesgue pasaule). Daudz teorēmu par zbіzhnіst vai sumuvannya ryadіv , , par zagalnym O. s. (j n(x)) atstarpe L2[a, b]virnі i sērijām ortonormālās sistēmās L2(X, S, m). Tajā pašā laikā, tajā pašā laikā, tajā pašā laikā, šajā ekscentriskajā noskaņā, tsіkavі specifisks O. s. Tā, piemēram, Hāra, Rademahera, Volša-Peli, Franklina sistēmas.
1) Haar sistēma

de m=2 n+k, , m=2, 3, .... Rindas saskaņā ar Haar sistēmu ar tipisku muca martingals un їm virnі zagalnі teorēmas no martingala teorijas. Turklāt sistēma ir pamats Lp, , un ceturtā sērija saskaņā ar Hāra sistēmu neatkarīgi no tā, vai tā ir integrēta funkcija vai nē, var saplūst visur.
2) Rademacher sistēma
є svarīgs dibens O. s. neatkarīgas funkcijas, un to var izstrādāt gan kā imovirnosti teoriju, gan kā ortogonālu un liela izmēra funkcionālo rindu teoriju.
3) Walsh-Peli sistēma ![]() nosaka, izmantojot Rademacher funkcijas:
nosaka, izmantojot Rademacher funkcijas:
de numurs ti q k tiek piešķirti no skaitļa n dubultā izkārtojuma:
![]()
4) Franklina sistēma ir ortogonalizēta ar Šmita funkciju secības metodi
Vons ir ortogonāla pamatne nepārtrauktu funkciju paplašināšanai.
Teorētiski vairākas ortogonālas rindas tiek uzskatītas par formas funkciju sistēmām
de - ortonormāla sistēma in L2[a, b].
Šādas ortonormalizācijas sistēmas m-pasaules kubā. J m =[a, b]x . .
.x[ a, b] i rep, t.i., atbildes sistēma (j n(x))
Lit.: [l] Kaczmarz S., Steinhaus R., Ortogonālo sēriju teorija, prov. z nyomu., M., 1958; Zinātnes maisiņi. Matemātiskā analīze, 1970, M., 1971, lpp. 109-46; tur, lpp. 147-202; Ozols J., Imovirnistni procesi, prov. no angļu val., M., 1956; Loevs M., Nekustīguma teorija, prov. no angļu val., M., 1962; Zigmunds A., Trigonometriskā sērija, prov. no angļu val., 1.-2.sēj., M., 1965.g. A. A. Talaljans.
- - kіntseva vai lіchlna sistēma f-tsіy, scho meli Hilberta telpa L2 un apmierina prātus F-tsіya gnaz. vaga O. s. f., * nozīmē sarežģītus panākumus ...
Fiziskā enciklopēdija
- - visu n-pasaules vektortelpas V lineāro transformāciju grupa virs lauka k, kas iegūst fiksētu nevirogēnu kvadrātisko formu Q uz V)=Q jebkuram)...
Matemātiskā enciklopēdija
- - matrica virs komutatīva gredzena R ar vienību 1, kurai matrica tiek transponēta apgrieztai. Vyznachnik O. m.
Matemātiskā enciklopēdija
- - Merezha, kas decimālpunktā ir ortogonāls dažādu ģimeņu līnijām. Pielietot O. s.: minimālās virsmas asimptotiskais mērs, lineārā mēra izliekums. A. V. Ivanovs...
Matemātiskā enciklopēdija
- - ortogonālais masīvs, OA - kx N izmēru matrica, kuras elementi ir skaitļi 1, 2, .....
Matemātiskā enciklopēdija
- - div. Izogonāla trajektorija...
Matemātiskā enciklopēdija
- - angļu valodā: Sistēmas "ģenerators - motors" Elektriskās piedziņas regulēšana, kāda veida elektriskās mašīnas pārveidošanas bloka pagarinājuma pārveidošana Dzherelo: Termini un definīcijas elektroenerģijas nozarē ...
Budіvelny vārdnīca
- - Div. Projekcija...
Lieliska enciklopēdiskā politehniskā vārdnīca
- - vēlēšanu rezultātu noteikšanas secība ar jebkādiem mandātiem starp partijām, ja tās izvirza savus kandidātus pārstāvības institūcijā, tos sadala pēc iegūto balsu skaita.
Juridisko terminu vārdnīca
- - Dažādi proporcionālās atlases sistēmas veidi. Lai iegūtu galīgos rezultātus, mēs uzminēsim proporcionālu pārvietošanās un preferenciālās balsošanas sistēmu.
Juridisko terminu vārdnīca
- - cilvēka ķermeņa ķermenis, kuram ir pēcnācēju radīšanas process ...
Medicīniskie termini
- - vairāku veidu gēnu sērija, kas kodē polimorfus proteīnus, kas atrodas uz lielu šūnu virsmas, lai atriebtu kodolu.
Medicīniskie termini
- - Pasūtiet Matrix...
- - okremy vpadok paralēlās projekcijas, ja visas projekcijas vai laukums ir perpendikulāra projekta taisnei.
Lielā Radianskas enciklopēdija
- - funkciju sistēma (), n = 1, 2,..., ir ortogonāla vagonam ρ uz vіdrіzku, piemēram, tiem, kas tiek piemēroti. Trigonometriskā sistēma 1, cos nx, sin nx; n = 1, 2,..., - O. s. f. ar vagonu 1 uz vіdrіzka ...
Lielā Radianskas enciklopēdija
- - ORTOGONĀLĀ FUNKCIJU SISTĒMA - funkciju sistēma n?, n = 1, 2,.....
Lieliska enciklopēdiskā vārdnīca
"ORTOGONĀLĀ SISTĒMA" grāmatās
XXIV sadaļa Vecā pozicionālo karu sistēma un mūsdienu gājienu sistēma
No grāmatas Stratēģija un taktika militārajā zinātnē autors Džomins Genrihs VeniaminovičsXXIV punkts Vecā pozicionālā kara sistēma ir pašreizējā gājienu sistēma Saskaņā ar pozīciju sistēmu, vecā metode metodiskā kara vadīšanai ar armijām, ka viņi nakšņo pie stafetes, ka viņi var sist zem rokas, ka viņi. viens pēc otra nodarbojas ar modrību; viena armija
19. Jēdziens "Krievijas Federācijas podatkova sistēma". Spivvіdnoshennia saprast "nodokļu sistēmu", ka "nodokļu sistēma"
3 nodokļu tiesību grāmatas autore Mikidze S G19. Jēdziens "Krievijas Federācijas podatkova sistēma". Spivvіdnoshennia saprot "nodokļu sistēmu" un "nodokļu sistēmu". Nodokļu sistēma ir Krievijas Federācijas noteikto federālo nodokļu, reģionālo un pašvaldību nodokļu kopums. Її struktūra ir fiksēta pie Art. Krievijas Federācijas Nodokļu kodeksa 13-15. Derīgs līdz
It kā tā būtu patiesība. Atsauces vēstures rekonstrukcija autors Nosivskis Glibs Volodimirovičs23. Ptolemaja ģeocentriskā sistēma un Tiho Brahes (un Kopernika) heliocentriskā sistēma Gaismas sistēma aiz Tiho Brahe ir parādīta att. 90. Pasaules centrā ir Zeme, tāpat kā Saule apvij apkārt. Planētu aizstāvji jau klīst ap Sontsju. Tas pats
23. Ptolemaja ģeocentriskā sistēma un Tiho Brahes (un Kopernika) heliocentriskā sistēma
3 autora grāmatas23. Ptolemaja ģeocentriskā sistēma un Tiho Brahes (un Kopernika) heliocentriskā sistēma Gaismas sistēma aiz Tiho Brahe ir parādīta att. 90. Pasaules centrā ir Zeme, tāpat kā Saule apvij apkārt. Prote, planētu reštas jau klīst ap Soncju. Tas pats
Ortogonālā matrica
GSEortogonālā projekcija
No autora Lielās Radianskas enciklopēdijas (OR) grāmatas GSEOrtogonāla funkciju sistēma
No autora Lielās Radianskas enciklopēdijas (OR) grāmatas GSE49. Tiesu sistēma un tiesībsargājošo iestāžu sistēma no "SRSR un Savienības republiku likumdošanas pamatiem" 1958. lpp.
No grāmatas Valsts vēsture un Krievijas tiesības autors Paškevičs Dmitro49. Tiesu sistēma un tiesībsargājošo iestāžu sistēma no "SRSR un Savienības republiku likumdošanas pamatiem" 1958. lpp. Tiesu sistēmas likumdošanas pamati noteica RSR Savienības tiesu sistēmas principus, koleģiālās pārbaudes principus.
Objektīvo (pozitīvo) tiesību sistēma un likumdošanas sistēma: izpratne
3 grāmatas Jurisprudence autors Mardaļjevs R.T.Objektīvo (pozitīvo) tiesību sistēma un likumdošanas sistēma: izpratne
29. Sodu vadības sistēma un pašregulācijas sistēma reprezentatīvās monarhijas periodā
autors29. Nakazova pārvaldes sistēma un vietējās pašregulācijas sistēma valsts reprezentatīvās monarhijas laikā Sods - centralizētās pārvaldes sistēmas orgāni kā mugurkauls, izkliedēti no viena zirga un timčas rindām. rokas, kuras jūs varat redzēt
86. Tiesu sistēma un tiesībsargājošo iestāžu sistēma no "SRSR un Savienības republiku likumdošanas pamatiem" 1958.g.
No grāmatām autors Dudkina Ludmila Volodimirivna86. Tiesu sistēma un tiesībsargājošo iestāžu sistēma no "SRSR un Savienības republiku likumdošanas pamatiem" 1958. lpp. Kopš 1948. gada SRSR un republiku procesuālajā likumdošanā tika atzītas būtiskas izmaiņas: 1) tautas tiesneši kļuva ievēlēti; 2) tiesneši kļuva vairāk
31. Francijas suverēno institūciju sistēma, tiesību un sistēmas izvēle
No Rozvinenikas apgabala konstitucionālo tiesību grāmatas autors Imaševs E G31. Francijas suverēnu orgānu sistēma, tiesību izvēle un izvēles sistēma Francijas varas orgānu sistēmu iedvesmoja apakšpārvaldes princips. Šodien Francija
44. Francijas suverēno institūciju sistēma, tiesību un sistēmas izvēle
No rozvinenikh krajn konstitucionālo tiesību grāmatas. Bērnu gultiņa autors Bilousovs Mihailo Sergijovičs44. Francijas suverēnu orgānu sistēma, likumu izvēle un Francijas kā zmishanoy (nosaukta prezidentāla) republikas sistēmas izvēle, varas orgānu sistēma balstās uz varas sadalīšanas principu. Francija šodien ir spēcīga republika
IV sadaļa. Galvas redzamības piekares sistēma. "Komahi" sistēma. Minisistēma
No Su Jok grāmatām ikvienam autors Woo Pak JaeIV sadaļa. Galvas redzamības piekares sistēma. "Komahi" sistēma. Minisistēma Subway galvas redzamības sistēma Ir divas galvas redzamības sistēmas uz pirkstiem un kājām: sistēma "pēc cilvēka tipa" un sistēma "atbilstoši radījuma tipam". Sistēma "kā cilvēks".
Pirmais emocionālais centrs ir cistiskā sistēma, dubļi, krovobіg, imūnsistēma, shkira.
3 grāmatas Viss būs labi! autors Hejs LuizaPirmais emocionālais centrs ir cistiskā sistēma, dubļi, krovobіg, imūnsistēma, shkira Yakshcho vy podavlenі p_dtrimki sim'ї un druzіv, tāpat kā jūs
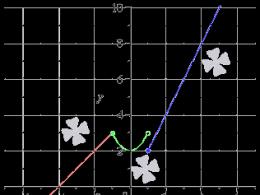
Ja uz vibrācijas plaknes ir divi savstarpēji perpendikulāri vektori un viens vektors (7. att.), tad lielāko vektoru vienā plaknē var izkliedēt aiz šo divu vektoru taisnēm, lai jūs to varētu redzēt redzeslokā.
![]()
de - skaitļi, kas vienādi ar vektora projekcijām uz taisnām asīm

Līdzīgi, ja trivi-pasaules telpā izvēlas trīs savstarpēji perpendikulārus vektorus un vienu garumu, tad šajā telpā var iedomāties pietiekamu vektoru.

Hilberta telpā var aplūkot pāru ortogonālu vektoru sistēmas šajā telpā, lai funkcijas
Šādas funkciju sistēmas sauc par ortogonālām funkciju sistēmām, un tām ir liela nozīme analīzē. Smaka ir dzirdama manipulatīvākajās zinātnēs matemātiskajā fizikā, integrālvienādojumos, tuvinājumos, dinamiskās čūskas funkciju teorijā utt. līdz mežonīgas izpratnes radīšanai par Hilberta plašumiem.
Dāma ir precīza. Funkciju sistēma
sauc par ortogonālu, it kā starp tām būtu divas ortogonālas sistēmas funkcijas, tātad

Trivi-pasaulīgajā plašumā mēs vimagali, tā ka lielākā daļa vektoru sistēmā tika pievienoti vientulībai. Uzminot vektora mērķi, Bachimo, ka citā Hilberta telpā to varētu uzrakstīt šādi:

Funkciju sistēmu, kas apmierina mainīgos (13) un (14), sauc par ortogonālu un normētu.
Ieviesīsim šādas funkciju sistēmas.
1. Intervālā varam aplūkot funkciju secību
Ādas divas secības funkcijas, kas ir ortogonālas viena otrai. Tse perevіryaєtsya pieņemsim tikai aprēķināt kopējo integrāļu skaitu. Vektora dozhini kvadrāts Hilberta telpā ir funkcijas kvadrāta integrālis. Šādā secībā kvadrāti dozhin vector_in secībā
integrāļa būtība
uz e. mūsu vektoru secība ir ortogonāla, bet nav normalizēta. Pirmā secības vektora Dovžina ir laba un viss
іnshі mаut dovzhina. Sadalot ādas vektoru y-o-dovzhina, mēs ņemam vērā ortogonālo un normalizēto trigonometrisko funkciju sistēmu
Šī sistēma vēsturiski ir viens no pirmajiem un svarīgākajiem ortogonālo sistēmu lietojumiem. Vaughn vinikla Euler, D. Bernoulli, d'Alembert robotos pie saites ar norādījumiem par virknes piesaisti. Šim pētījumam bija svarīga loma visas analīzes izstrādē.
Trigonometrisko funkciju ortogonālās sistēmas izskats saistībā ar virknes sadalīšanas instrukcijām nav vipadkovs. Tā ir ādas problēma, lai samazinātu nelielo vides daudzumu līdz divkāršai ortogonālo funkciju sistēmai, kas raksturo tā saukto dotās sistēmas līmeņa jaudu (Div. § 4). Piemēram, saitē no instrukcijas par sfēras caurduršanu tiek sauktas tā sauktās sfēriskās funkcijas, saitē no instrukcijas par apaļās membrānas jeb cilindra caurduršanu tās sauc par tā sauktajām cilindriskajām funkcijām. .
2. Var iestatīt ortogonālas funkciju sistēmas dibenu, ādas funkcija ir bagātīgs termins. Šāds dibens ir bagātīgi artikulētā Leģendas secība
![]()
Tobto є (līdz konstanta reizinātāja precizitātei) ir laba vіd sistēma. Mēs pierakstām pirmo bagātīgi artikulēto secību šprotu:

Ir acīmredzams, ka solī ir bagātīgs elements. Mēs ceram, ka lasītājs pats perekonatisya, scho tsі bagātīgi sadalīta є ortogonāla secība uz intervālu
Ortogonālo variantu terminu teoriju (tā sauktos ortogonālo variantu terminus ar vagu) izstrādāju, 19. gadsimta otrajā pusē izceļot brīnumu krievu matemātiķi P. L. Čebiševu.
Sadalījums pēc ortogonālām funkciju sistēmām. Tāpat kā iepriekš, tāpat kā trivi-pasaulīgu ādas izplatību, vektoru var atklāt
vizuāli lineārā trīs pāru ortogonālo vektoru kombinācijā vienā periodā
funkcionālā telpa vaino uzdevumu izkārtot pietiekamu funkciju rindā aiz ortogonālas un normalizētas funkciju sistēmas, tas ir, par funkcijas attēlojumu izskatā
Ar sērijas (15) palīdzību tiek saprasta funkcija starp elementiem Hilberta plašumā. Tse nozīmē, ka funkcijas daļējās summas vidējais kvadrātiskais uzlabojums tiek samazināts līdz nullei pie , tad.

Šādu zbіzhnіst sauc par "zbіzhnіstyu vidū".
Ortogonālo funkciju paplašināšana klusākās sistēmās bieži tiek izmantota analīzē un ir svarīga matemātiskās fizikas problēmu risināšanas metode. Tā, piemēram, kā ortogonāla sistēma ir intervāla trigonometrisko funkciju sistēma
tad tas ir klasiskā funkciju izvērsums trigonometriskā rindā
Pieņemsim, ka izkārtojums (15) ir iespējams jebkurai funkcijai Hilberta telpā, un mums ir zināmi šāda izkārtojuma koeficienti. Kuram, reizinosim greizsirdības ievainotās daļas ar pašu mūsu sistēmas funkciju. Mēs noņemam greizsirdību
no kura sakarā ar to, ka koeficienta vērtība
Mi, tāpat kā un krāšņajā triviālajā telpā (div. otrās rindkopas sākums), koeficienti ir vienādi ar vektora projekcijām uz vektoru taisnēm.
Nosakot skalārās izveides mērķi, tiek pieņemts, ka funkciju sadalījuma koeficienti atrodas aiz ortogonālās un normalizētās funkciju sistēmas
pieturēties pie formulām

Piemēram, mēs varam aplūkot parasto ortogonālo trigonometrisko funkciju sistēmu, es to likšu augstāk:


Mēs atņēmām formulu trigonometriskās rindas funkcijas izplešanās koeficientu aprēķināšanai pielaidēs, acīmredzot, ka paplašināšana ir iespējama.
Mēs esam noteikuši pielaidē aiz ortogonālās funkciju sistēmas funkcijas izkārtojuma koeficientu veidu (18), kāds var būt šāds izkārtojums. Tomēr neizsmeļama ortogonāla funkciju sistēma var šķist nepietiekama, lai funkciju varētu izplatīt ārpus Hilberta telpas. Lai šāds izkārtojums būtu iespējams, ortogonālo funkciju sistēma ir vainīga dodatkova prāta apmierināšanā - tā visu laiku sauc prātu.
Ortogonālu funkciju sistēmu sauc par jaunu, jo tai nav iespējams pievienot to pašu, kas nav vienāds ar nulles funkciju, ortogonālu visām sistēmas funkcijām.
Ir viegli norādīt nepov ortogonālas sistēmas sadursmi. Kam mēs to uztveram kā ortogonālu sistēmu, piemēram, tas pats
trigonometrisko funkciju sistēma, kas ietver vienu no šīs sistēmas funkcijām, piemēram, neierobežota funkciju sistēma, kuras trūkst
tas būs, tāpat kā iepriekš, ortogonāls, acīmredzot, tas nebūs tas pats, jo mēs esam ieslēguši funkciju: tā ir ortogonāla visām sistēmas funkcijām.
Ja funkciju sistēma nav pilnīga, tad, ja funkcija no Hilberta plašuma nav iespējama, to var izkārtot atbilstoši tai. Patiešām, ja mēs cenšamies aiz šādas sistēmas novietot nulles funkciju, kas ir ortogonāla visām sistēmas funkcijām, tad, izmantojot formulas (18), visi koeficienti šķiet vienādi ar nulli, lai gan funkcija nav vienāda ar nulli.
Var nākt teorēma: ja funkciju sistēma ir pilnīgi ortogonāla un normalizēta Hilberta telpā, tad vai funkciju var ievietot rindā aiz šīs sistēmas funkcijām.
Izmantojot jebkuru koeficientu, izkārtojums ir uzlabots vektoru projekcijām uz ortogonālas normalizētas sistēmas elementu.

2. paragrāfā Pitagora teorēma ir acīmredzama Hilberta telpā, ļaujot uzzināt korelācijas ciklu starp koeficientiem un funkciju Būtiski caur starpību starp summu un sērijas pirmajiem locekļiem, tobto.
Vienāds ar nulli:
.Ortogonālā sistēma dažādos veidos var būt vikoristana kā telpas pamats. Kam jebkura elementa izkārtojumu var aprēķināt, izmantojot formulas:, de.
Vipadok, ja visu elementu normu sauc par ortonormālu sistēmu.
Ortogonalizācija
Be-yak ovna lineāri neatkarīga sistēma gala telpā kā pamats. No vienkārša pamata ir iespējams arī pāriet uz ortonormālo bāzi.
Ortogonāls izkārtojums
Izkliedējot vektorus telpā ortonormāli, tiek uzdots skalārās izveides aprēķins: , de i .
Div. arī
Wikimedia fonds. 2010 .
Interesanti, kas ir "ortogonālā sistēma" citās vārdnīcās:
1) Apmēram... Matemātiskā enciklopēdija
- (grieķu ortogonios taisnvirziena) kіntsev vai lihlna ftsіy sistēma, kas atrodas (atdalāma) Hilberta telpa L2(a,b) (kvadrātiski integrēta ftsіy) un apmierina prātus Ftsіya g (x) zvaigznes. vaga O. s. f., * nozīmē ...... Fiziskā enciklopēdija
Funkciju sistēma n(x) ) skalāri izveidot vektorus ... Lielā enciklopēdiskā vārdnīca
Funkciju sistēma (φn(x)), n = 1, 2, ..., uzdevumi apakšnodaļai [a, b], kas apmierina progresējošu prāta ortogonalitāti: ar k≠l, de ρ(x) ir deac funkcija, kā to sauc par vag. Piemēram, trigonometriskā sistēma ir 1, sin x, cos x, sin 2x, ... Enciklopēdiskā vārdnīca
Sistēma ftsіy ((fn(x)), n=1, 2, ..., piešķīrumi apakšnodalījumam [a, b] i apmierina nākamo, apzināto ortogonalitāti ar k nav vienāda ar l, de p(x) ir noteikta funkcija, es to saucu par wag Piemēram, trigonometriskā sistēma ir 1, sin x, cosx, sin 2x, cos 2x, ... O.s.f. Dabaszinātnes. Enciklopēdiskā vārdnīca
Funkciju sistēma ((φn (x)), n = 1, 2,..., ortogonāla pret ρ (x) uz sliedes [a, b], piemēram, tās, kas tiek izmantotas Lietojumprogrammā. Trigonometriskā sistēma 1, cos nx , sin nx ;n = 1, 2,..., O. s., ar 1 uz sliedes [π, π]. Lielā Radianskas enciklopēdija
Ortogonālās ir jebkura metriskā tenzora koordinātas ar diagonālo skatu. de d Ortogonālās koordinātu sistēmās q = (q1, q², …, qd) koordinātu virsmas ir ortogonālas atsevišķi. Zokrema, Dekarta koordinātu sistēmā ... Wikipedia
ortogonāla bagātīgu kanālu sistēma- - [L.G.Sumenko. Angļu-krievu informācijas tehnoloģiju vārdnīca. M .: DP TsNIIS, 2003.] Informācijas tehnoloģiju tēmas zagal EN ortogonālais multiplekss ...
(fotogrammetriskā) attēla koordinātu sistēma- Koordinātu sistēma ir taisni ortogonāla telpai, jo to fotogrammetriskajā attēlā fiksē koordinātu ikonu attēli. [GOST R 51833 2001] Fotogrammetrijas tēmas… Dovіdnik tehniskais tulkojums
sistēma- 4.48 sistēma 1. piezīme. Sistēmu var uzskatīt par produktu vai pakalpojumu, uz kuru tā balstās. 2. piezīme Praksē… Normatīvās un tehniskās dokumentācijas terminu vārdnīca
Tikšanās 1. ) sauc par ortogonālu, jo visi elementi ir pa pāriem ortogonāli:
1. teorēma. Ortogonāla nulles vektoru sistēma un lineāri neatkarīga.
(Pieņemsim, ka sistēma ir lineāri atmatā: es par dziedāšanu, Mēs reizinām skalāro ekvivalenci ar . Vrakhovuyuchi sistēmas ortogonalitāte, mēs ņemam vērā: }
Tikšanās 2. Vektoru sistēma Eiklīda telpā ( ) sauc par ortonormālu, jo tas ir ortogonāls un ādas elementa norma ir vienāda.
No 1. teorēmas mēs uzreiz redzam, ka ortonormāla elementu sistēma noteikti ir lineāri neatkarīga. Zvіdsi, tavā pusē, kliedz, kas iekšā n– sistēma ir ortonormāla mierīgajai Eiklīda telpai n vector_in izveido bāzi (piemēram, ( i, j, k ) plkst.3 X- mierīga telpa). Tādu sistēmu sauc ortonormāls pamats, un її vektori - pamata orts.
Vektora koordinātas ortonormālā bāzē var viegli mainīt ar skalāras izveides palīdzību: Diyno, vairojot greizsirdību uz , Lūdzu, ievadiet formulu.
Tiek ņemti vērā visi galvenie lielumi: vektoru skalārais tvirs, vektora garums, kuta kosinuss starp vektoriem utt. var būt visvienkāršākā forma ortonormālā veidā. Paskaties uz skalāru tvir: , oskіlki
Un visi pārējie papildinājumi ir nulle. Uzreiz izklausās otrimuemo:,
* Sīkāk apskatīsim pamatbāzi. Skalārais pagrieziens, kurā bāze ir uzlabota:
(Šeit a iі β j – vektoru koordinātas tuvu bāzei ( f), un - skalāri izveidot pamata vektorus).
Vērtības γ ij nokārtot matricu G, es zvanu Gramu matrica. Skalārā virpe matricas formā izskatās šādi: *
2. teorēma. Be-yakomā n– mierīgajai Eiklīda telpai ir ortonormāls pamats. Teorēmas pierādījums nav konstruktīvs un to nevar izsaukt
9. Grama-Šmita ortogonalizācijas process.
Aiziet ( a 1,...,a n ) − papildu pamats n- mierīgs Eiklīda plašums (šāda pamata pamats ir n- Kosmosa mierīgums). Algoritms, lai izraisītu šo ortonormālā lauka pamatu ofensīvā:
1.b 1 \u003d a 1, e 1 \u003d b 1/|b 1|, |e 1|= 1.
2.b 2^e 1 , jo (e 1, a 2)- projekcija a 2 uz e 1, b 2 \u003d a 2 -(e 1, a 2)e 1 , e 2 \u003d b 2/|b 2|, |e 2|= 1.
3.b 3^a 1, b 3^a 2 , b 3 \u003d a 3 -(e 1, a 3)e 1 -(e 2, a 3)e 2 , e 3 \u003d b 3/|b 3|, |e 3|= 1.
.........................................................................................................
k. b k^a 1 ,..., b k^a k-1 , b k = a k - S i=1 k(e i , a k)e i , e k = b k/|b k|, |e k|= 1.
Turpinot procesu, mēs ņemam ortonormālu pamatu ( e 1 ,...,e n }.
1. piezīme. Apskatāmā algoritma palīdzību var inducēt lineāras aploksnes ortonormālo bāzi, piemēram, sistēmas lineārās aploksnes ortonormālo bāzi, kāds ir rangs, kāds ir labs trio un sastāv no piecām. vektori.
dibens.x =(3,4,0,1,2), y =(3,0,4,1,2), z =(0,4,3,1,2)
2. piezīme.Īpaši vipadki
Grama-Šmita procesu var arī pārslogot bezgalīgā lineāri neatkarīgu vektoru secībā.
Turklāt Grama-Šmita process var stagnēt līdz lineāriem papuves vektoriem. Kādā veidā jūs redzat 0 (nulles vektors) īsumā j , patīk aj є lineāra vektoru kombinācija a 1,...,a j -1 . Faktiski, lai saglabātu izejas vektoru ortogonalitāti un izvairītos no dalīšanas ar nulli, kad tie ir ortonormāli, algoritms ir vainīgs nulles vektoru apvēršanā un to atņemšanā. Vektoru skaits, ko redz algoritms, ir plašāks nekā vektoru ģenerētā telpa (tas ir, lineāri neatkarīgo vektoru skaits, lai jūs varētu redzēt vektoru vidu).
10. Ģeometriskās vektortelpas R1, R2, R3.
Mēs atbalstām, ka ģeometriskajai sajūtai, kas nav starpposma, var būt vairāk vietas
R1, R2, R3. Izvērsums R n n > 3 ir abstrakts matemātisks objekts.
1) Ļaujiet man sniegt jums divu vektoru sistēmu a і b . Ja sistēma ir lineāri atmatā, tad viens no vektoriem ir pieļaujams a , lineāri izteikts ar otru:
a= k b.
Divus vektorus, kas saistīti ar šādu papuvi, kā teikts, sauc par kolineāriem. Arī divu vektoru sistēma ir vēl vairāk lineāri atmatā
pat ja vektori ir kolineāri. Cieņā tāds visnovoks ir redzams ne tikai līdz R 3, bet pat līdz kaut kādai lineārai klajumam.
2) Ļaujiet R3 sistēmai sastāvēt no trim vektoriem a, b, c . Lineārais noguldījums nozīmē, ka viens no vektoriem, teiksim a , Lineāri izteikts ar інші:
a= k b+ l c . (*)
Pieraksts. Trīs vektori a, b, c R3, kas atrodas vienā plaknē vai paralēli tai pašai plaknei, sauc par koplanāriem
(mazos mērogos norādīti vektori a, b, c no vienas plaknes un labās puses ir vienādi vektori un ievietojumi dažādās vālītēs un vairāk nekā paralēli vienai plaknei).
Tā kā trīs vektori R3 ir lineāri novecojuši, tad smaka ir vienāda. Godīgs un cienīgs: tāpat kā Vectori a, b, c s R3 ir koplanārs, visa smaka ir lineāri atmatā.
vektora radošā darbība vektors a, uz vektoru b telpu sauc par vektoru c kas priecē progresējošo vimogu:
Apzīmējums:
Apskatīsim sakārtoto nekopplanāru vektoru trio a, b, c triviālā telpā. Šo vektoru vālītes summa punktos BET(lai izvēlētos diezgan plašu punktu BET un paralēli pārnesams ādas vektors tā, ka vālītes spivpav ar punktu BET). Kіntsi vektorіv, poddnannyh uz vālītes punktā BET, Neguliet uz vienas taisnes, jo vektori nav vienā plaknē.
Nekopplanāru vektoru trīsvienība ir sakārtota a, b, c netālu no trivimir telpas sauc pa labi, kas ir vektora beigas c īsākais pagrieziens vektorskatā a uz augšu vektors b var redzēt anti-Godinņikova bultas posterigache. І navpaki, tā kā aiz gada bultas redzams īsākais pagrieziens, tad trio sauc dzīvīgs.
Pretējā gadījumā iecelšana pov'yazane s labā roka tiek ņemti cilvēki (div. mazuļi), zvaigznes un vārdi.
Jābūt pa labi savā starpā (un pa kreisi savā starpā) vektoru tripletus sauc par vienu un to pašu orientāciju.
Par kādu valodu
Ziņa par Madzhvik filtru parādīšanās vietnē Habré bija simboliska zīme. Iespējams, bezpilota lidaparātu mežonīgi slaktētie atdzīvināja interesi par uzdevumu novērtēt ķermeņa orientāciju no inerces vimīrijas. Ar šo tradicionālo metodi, kuras pamatā ir Kalmana filtrs, viņi pārstāja apmierināt sabiedrību - no lieliem augstumiem līdz bezpilota lidaparātiem nepieņemamajam resursu skaitam, ar locīšanu un neintuitīvu parametru pielāgošanu.
Ierakstu atbalsta kompaktāka un efektīvāka filtra ieviešana C. Tomēr, spriežot pēc komentāriem, fiziskais kods ir mainīts, kā arī visa statistika, kam tas ir neskaidrs. Nu, būsim godīgi: Madzhvik filtrs ir vienkāršākais no filtru grupas, kura pamatā ir vienkārši un eleganti principi. Es aplūkošu principus savā ierakstā. Šeit nebūs koda. Mans ieraksts nav par konkrētu orientācijas novērtēšanas algoritma ieviešanu, bet gan par labāku variāciju prasīšanu par doto tēmu, kas var būt vēl bagātāka.
Orientācijas iesniegšana
Uzminēsim pamatus. Lai novērtētu ķermeņa orientāciju telpā, ir jāizvēlas pareizie parametri, it kā uzreiz viennozīmīgi nosaka orientāciju, tobto. būtībā saistītās koordinātu sistēmas orientācija ir garīgi neiznīcināma sistēma - piemēram, ģeogrāfiskā sistēma NED (North, East, Down). Pēc tam ir nepieciešams salocīt kinemātiskās līnijas, tobto. virazity swidkіst zmіni tsikh parametrіv caur kutova swidkіst žiroskopiem. Nareshti, pēc iespējas jāievieš vektoru mērīšana akselerometros, magnetometros. Orientācijas atklāšanas veidu atrašanas ass:
Kuti Eilers- roll (roll,), piķis (pitch,), virziens (heading,). Svarīgākais un kodolīgākais parametru kopums orientācijā: parametru skaits tieši tādā pašā skaitā atklāto brīvības pakāpju. Par cih kutiv varat pierakstīt Eilera kinemātiskā izlīdzināšana. Teorētisko mehāniku labāk mīlēt, bet no navigācijas smirdoņa maz ko. Pirmkārt, zināšanas par kutіv neļauj pārveidot jebkura vektora sastāvdaļas no savienotā vektora uz navpak ģeogrāfisko koordinātu sistēmu. Citā veidā pie ±90 grādu leņķa kinemātiskie izlīdzinājumi griežas, ripo un kurss kļūst nenozīmīgi.
Matricas pagriešana- 3 × 3 matrica, ir nepieciešams reizināt jebkuru vektoru saistītā koordinātu sistēmā, lai ņemtu to pašu vektoru ģeogrāfiskā sistēmā: . Matrica obligāti ir ortogonāla, tas ir. . Kinemātiski vienlīdzīga viņai var izskatīties.
Šeit ir matrica ar virsotnes ātruma komponentiem, ko mēra ar žiroskopiem koordinātu sistēmas pozīcijās:
Troch rotācijas matrica ir mazāka pirmajā, apakšējā Eilera griezumā, tad uz to skata ļauj bez starpniekiem mainīt vektorus, un tajā pašā virsotnes pozīcijā jēga nav pieļaujama. No skaitliskā viedokļa galva nedolіk ir pārpasaulīga: trīs brīvības soļu labad ir ieviesti deviņi parametri, un tie ir jāpaaugstina līdz kinemātiskajam līmenim. Zavdannya var būt trohi prostitiv, skoristavshis ortogonalitāte matricas.
Quaternion griezties- radikāls, vēl neintuitīvāks zasіb pret pārpasaulību un atdzimšanu. Viss komponentes objekts nav skaitlis, nav vektors un nav matrica. Jūs varat brīnīties par kvaternionu no diviem leņķiem. Pirmkārt, kā formālu skalāra un vektora summu, de - pa vienam vektorus un asis (kas, protams, izklausās absurdi). Citādā veidā, piemēram, komplekso skaitļu kontekstā, tagad ir nevis viens, bet trīs rіznih uyavnyh vienatnē (scho izklausās ne mazāk absurds). Kā notiek saišu ceturtdaļa no pagrieziena? Izmantojot Eilera teorēmu: ķermeni vienmēr var pārtulkot no vienas dotās orientācijas uz citu pa viena gala pagriezienu uz decimālpunkta pa deko asi ar tiešo vektoru . Tsі kut і vsіs var būt poednati in quaternion: . Tāpat kā matricu, ceturtdaļu var mainīt bez neviena vektora starptransformācijas no vienas koordinātu sistēmas uz citu: . Kā redzat, arī orientācijas izpausmes ceturtdaļa cieš no virspasaulības, bet mazāk bagātīgas zemākas matricas: ir tikai viens parametrs. Gruntlivy skatiens quaternions vszhe buv on Habré. Tas bija par ģeometriju un 3D grafiku. Mūs sauc par kinemātiku, ceturkšņa zviedriskuma šķembas jāsaskaņo ar ziemīgo kutovoy shvidkistyu. Vіdpovіdne kіnеmachne іvnyannja maє vglyad de vector tezh vvazhєtsya quaternion ar nulles skalāro daļu.
Filtru shēmas
Būtiskākās izmaiņas orientācijas aprēķinos ir izstrādāt ar kinemātiskiem vienādiem un uzlabot līdz jaunam parametru kopumam, kas kļuvis mūsu cienīgs. Piemēram, ja esam izvēlējušies rotācijas matricu, tad varam uzrakstīt cilpu kvadrātam C += C * Omega * dt . Rezultāts ir rūcošs. Žiroskopiem, īpaši MEMS, var būt lielas un nestabilas nulles nobīdes - rezultātā tiem būs pilnīgi mierīga orientācija, kas tiks aprēķināta, ja māmiņām nekrās piedošanu (drift). Visi Mahona, Majvika un citu kļūdu izgudrotie triki, izņemot mani, tika izmantoti, lai kompensētu šo radiācijas izstarojuma novirzi, ieskaitot akselerometrus, magnetometrus, GNSS uztvērējus, baļķus. Tā radās vesela orientācijas filtru saime, kuras pamatā ir vienkāršs pamatprincips.
Pamatprincips. Lai kompensētu orientācijas novirzi, žiroskopiem ir jāpievieno vēja ātruma virsotne, kas tiek kontrolēta, pamatojoties uz citu sensoru vektora regulēšanu. Vector kuruyuchoї kutovoї shvidkostі ir vainīgs prgnati pojdnati dirección of virіryanih vektorіv z їх vіdomiі іtrіnimi іnimimi.
Šeit ir noteikta Kalmana filtra apakšējā līnija. Pati prāta galva ir tajā, ka zviedrs ir foršs, ka tiek galā, - nevis dodanok, bet reizinātājs novērtējot vērtības (matricas vai ceturtdaļas). Izklausās svarīgas lietas, ko teikt:
- Novērtēšanas filtru var izmantot pašorientācijai, nevis nelielām orientācijas atšķirībām, piemēram, žiroskopiem. Ar šo vērtības aprēķinu tas tiek automātiski apmierināts ar nepieciešamajiem mainīgajiem, it kā uzliekot uzdevumu: matrica būs ortogonāla, ceturtdaļa tiks normalizēta.
- Izliektās virsotnes shvidkost fiziskā sajūta ir bagātīgi skaidrāka, zemāka nekā Kalmana filtra coryguval dodanka. Visas manipulācijas darbojas ar vektoriem un matricām lieliskajā triviālajā fiziskajā telpā, nevis abstraktajā daudzdimensionālajā stāvokļu telpā. Ir vērts atcerēties lūgt pievienot un pielāgot filtru, un kā bonusu tas ļauj iegūt liela izmēra matricu un lieliskas matricu bibliotēkas.
Tagad mēs brīnāmies, kā ideja tiek realizēta konkrētās filtru opcijās.
Mahone filtrs. Visa Makhona sākotnējo statūtu niknā matemātika tika uzrakstīta, lai izveidotu nesakarīgas vienādības (32). Pārrakstīsim tos savos apzīmējumos. Ja tas ir atkarīgs no nulles žiroskopu vērtējuma, tad ir divas izlīdzināšanas atslēgas - tā ir labāka kinemātiskā izlīdzināšana matricas rotācijai (ar asu virsotnes nobīdi matricas skatījumā) un nobīdes veidošanās likums. vektora skats. Vienkāršības labad ir pieņemams, ka nav paātrinājuma, nav magnētiskas vadības un kuru vēji mums ir pieejami, lai mazinātu paātrināto kritienu akselerometru veidā un Zemes magnētiskā lauka intensitāti. magnetometri. Uzbrūkošos vektorus kontrolē sensori koordinātu sistēmas savienojumā, un to atrašanās vietu ģeogrāfiskajā sistēmā ir zināms: virziens kalnā - uz magnētisko pivnihu. Tad Makhon filtra izlīdzināšana izskatās šādi:
Paskatieties uz draugu ar cieņu. Pirmais dodanoks labajā daļā ir centrālā tvera. Pirmais reizinātājs jaunpienācējam ir paātrinātā brīvā kritiena cilvēki, otrs ir īstais. Ja reizinātājus nosaka viena koordinātu sistēma, tad otrs reizinātājs mainīsies, lai atbilstu reizinātāju sistēmai ar . Kutova swidkіst, pobudovan kā vektors dobutok, perpendikulāri plaknei vector_v-multiples. Tas ļauj pagriezt savienotās koordinātu sistēmas rozrahunkove pozīciju, vektoru reizinātāju doki nerodas sp_v_dut taisnā līnijā - tad vektora twir tiek atiestatīts uz nulli un rotācija tiek fiksēta. Koeficients ir likt cietību tik veselīga saite. Vēl viens papildu solis ir veikt līdzīgu darbību ar magnētisko vektoru. Būtībā Mahoney filtrs seko labi zināmajai tēzei: zināšanas par diviem nekolineāriem vektoriem divās dažādās koordinātu sistēmās ļauj unikāli identificēt šo sistēmu savstarpējo orientāciju. Tāpat kā vektors vairāk nekā divos, lai dotu korīnu pasaulīgajam vimirjuvanam. Ja ir vairāk nekā viens vektors, tad vienu atklātu brīvības pasauli (ruh dažiem vektoriem) nevar fiksēt. Piemēram, ja ir dots tikai vektors, tad ir iespējams noregulēt driftu uz ripošanos un piķi, bet ne uz kursu.
Zrozumіlo, pie Mahon filtra, tas ir neobov'yazkovo, lai paātrinātu matricas pagriezienu. Є th nekanoniskā ceturkšņa varianti.
Virtuālā giroplatforma. Makhon filtrā pievienotajai koordinātu sistēmai pievienojām keruyuchu kutov shvidkіst. Ale, jūs varat pievienot її і ģeogrāfiskās koordinātu sistēmas rozrachunk pozīcijai. Kinemātiski vienāds ar vienu dienu es skatos
Šķiet, ka šāds pidhіd paver ceļu uz vēl ticamākām fiziskām analoģijām. Lai pabeigtu minējumus, no kuriem tika sākta žiroskopiskā tehnika, - kursa vertikālās un inerciālās navigācijas sistēmas, kuru pamatā ir žiroskopiski stabilizēta platforma pie kardāna.

www.theairlinepilots.com
Platformas vadītājs bija atbildīgs par ģeogrāfiskās koordinātu sistēmas materializāciju. Deguna orientācija tika kontrolēta atbilstoši platformas virzienam ar izgriezuma sensoriem uz balstiekārtas rāmjiem. Žiroskopiem dreifējot, aiz tiem dreifēja platforma, un pie bagāžniekos esošo sensoru rādījumiem krājās piedošana. Lai saņemtu piedošanu, platformā uzstādītajos akselerometros ieviešot atgriešanās saiti. Piemēram, platformas kustību virzienā uz labo asi uzņēma līdzīgas ass akselerometrs. Šis signāls ļauj iestatīt maksimālo ātrumu, kā vadīt, kā pārvērst platformu horizontā.
Ar vislabāko izpratni mēs varam būt kā mājās, veicot savus uzdevumus. Ierakstītā kinemātiskā izlīdzināšana jālasa šādi: orientācijas maiņas ātrums un atšķirība starp diviem atklātajiem rukhiviem - deguna absolūto ruhu (pirmais dodanok) un virtuālās žiropplatformas absolūto ruhu (vēl viens dodanoks). Analoģiju var paplašināt un keruyucho kutovoy ї shvidkosti formēšanas likumu. Vektors tiek izmantots, lai parādītu akselerometriem, kā stāvēt uz žiroskopa platformas. To pašu var uzrakstīt fiziskai spoguļošanai:
To pašu rezultātu var sasniegt formāli, veicot vektoru reizināšanu Makhon filtra dvēselē, bet nevis cilpā, bet gan ģeogrāfiskajā koordinātu sistēmā. Tikai tas, kas vajadzīgs?
Pirmā platformas un bezplatformas inerciālās navigācijas analoģijas spriedze, iespējams, ir saistīta ar veco Boeing patentu. Tad šo ideju aktīvi pētīja Saļičevs, bet pārējā stundā - arī es. Šādas pieejas acīmredzamās priekšrocības:
- Keryuyuchu kutovu swidkіst var veidot ar urahuvannyam zrozumіlih fiziskiem principiem.
- Protams, pastāv horizontālo un kursa kanālu iedalījums, jo atšķiras to jaudas un korekcijas metodes. Pie Makhon filtra smird smirdīgi.
- Manuāli kompensējiet, ievadot GNSS datu iegūšanas ātrumu, kas ir redzams pats par sevi ģeogrāfiskajā, bet ne citās asīs.
- Algoritmu ir viegli pārveidot augstas strāvas inerciālās navigācijas režīmā, lai varētu mainīt Zemes formu. Kā tse robiti shēmu Mahone, es nerādu.
Madžvika filtrs. Majvik ir izveidojis svarīgu ceļu. Tāpat kā Mahons, pieprasot visu, intuitīvi nonāca pie sava lēmuma un pēc tam to matemātiski noapaļoja, tad Majviks jau no paša sākuma parādīja sevi formālistu. Vіn uzņēmās optimizācijas uzdevumu. Novērtējot šādus vīnus. Mēs iestatām orientāciju ar ceturkšņa rotāciju. Ideālā veidā rozrahunkovy uzreiz kā vimiryuvany vektors (neļausim tam būt) iet kopā ar patieso. Tu būsi. Patiešām, jūs ne vienmēr varat sasniegt (it īpaši, ja ir vairāk nekā divi vektori), taču varat mēģināt samazināt precīzās vienlīdzības atšķirību. Par ko mēs ieviešam minimizēšanas kritēriju
Gradienta nolaišanās efekta minimizēšana - berze ar nokauj plaisām, pretējs gradientam, tobto. pretēji pēdējam funkcijas paplašinājumam. Pirms runas Majviks drīkst piedot: neielaist vīnus visos viņa robotos un drosmīgi rakstīt zamіst, gribēdams reāli saskaitīt sevi.
Rezultāta gradienta nolaišanās ir jāvērš uz aizvainojošu prātu: lai kompensētu orientācijas novirzi, ir nepieciešams palielināt ceturkšņa maiņas ātrumu no jauno negatīvo papildinājumu kinemātiskās izlīdzināšanas, proporcionāli:
Šeit Majvik nedaudz ieiet mūsu “pamatprincipā”: mēs pievienojam pareizo terminu nevis augšējam swidness, bet gan swidkost mainām ceturtdaļu, bet mēs tos nesaucam vienādi. Kara laikā iespējams, ka kvartāla atjaunošanas pārstās būt vienotas un, acīmredzot, tērēs ēku, lai pārstāvētu orientāciju. Līdz ar to Madjvik filtram ceturkšņa gabalveida normēšana ir svarīga darbība uz mūžu, tai stundai, citiem filtriem tas ir slikti, nevis neobov'yazkove.
Ātrgaitas injekcija
Līdz šai stundai runāja, ka nav pareizu paātrinājumu, un akselerometri nogalina tikai brīvā kritiena paātrinājumu. Tas ļāva izmantot vertikālo standartu un palīdzēt kompensēt sānsveres un slīpuma novirzi. Prote y vipadku akselerometrija, neatkarīgi pēc tās principa dії, vimіryuyut to ātri iedeva- Patiesā ātruma pārsniegšanas un brīvā kritiena ātruma pārsniegšanas vektoru atšķirība. Tieši paātrināts, kas tiek dots, nenovirzās no vertikāles, un ripas un piķa novērtējumos tiek pasludināta piedošana, zvērējot uzslavas.
To ir viegli ilustrēt ar papildu analoģiju ar virtuālo giroplatformu. Korekcijas sistēmu darbina tas, ka platforma ir fiksēta tajā stūra pozīcijā, kurā tiek atiestatīti akselerometru signāli, kuri nav uzstādīti pie cita, tobto. ja vektors kļūst perpendikulārs akselerometru jutības asīm. Tiklīdz nav iespējas, tas aizbēg no horizonta. Ja jūs vainojat horizontālo paātrinājumu, žiroplatforma pārvietosies. Var teikt, ka žiroplatforma ir līdzīga stipri amortizētam svārstam vai templim.

Komentāros pirms ziņas par Majvik filtru palaida garām punktu par tiem, kuri var būt spodіvatisya, ka šis filtrs ir mazāk piemērots ātrākam, zemākam, piemēram, Mahon filtram. Diemžēl visi šeit aprakstītie filtri darbojas pēc tiem pašiem fiziskajiem principiem un cieš no tā, saskaroties ar pašām problēmām. Fiziku ar matemātiku apmānīt nav iespējams. Pie kā tu strādā?
Pagājušā gadsimta vidū tika izgudrots visvienkāršākais un rupjākais veids aviācijas žirovertikālēm: mainiet vai no nulles maksimālo ātrumu, kuru kontrolējat, acīmredzamības labad paātrināt vai maksimālo ātrumu uz kursu (piemēram, pastāstīt par ieeju uz pagriezienu). To pašu metodi var pārnest uz jaunākajām bezplatformni sistēmām. Ir jāvērtē pēc vērtībām, nevis it kā pēc nulles pakāpēm. Tomēr pie šāda zavzhdi izmēra ir iespējams palielināt pareizo ātrumu ātra kritiena projekciju veidā, ko pietuvina trausla žiroskopa platforma, kas ir jāuzņemas. Tāpēc metode nav praktiska - tad tā nav atkarīga no parastajiem papildu sensoriem.
Precīzāks veids, kā balstīties uz vislabāk zināmajiem vēja ātrumiem no GNSS uztvērēja. Ja zini ātrumu, tad vari skaitliski atšķirt un atņemt īsto. Tad mazumtirdzniecība būs tieši veselīga neatkarīgi no nodiluma. Jūs varat paātrināt kā skaidru vertikāli. Piemēram, skatā varat iestatīt žiroplatformas vadības korpusu
Sensora nulles nobīde
Lēnākās klases žiroskopu un akselerometru kopējā īpatnība ir lielā nulles nestabilitāte laika un temperatūras gaitā. To pieņemšanai nepietiek tikai ar vienu rūpnīcas vai laboratorijas kalibrēšanu - būs jāpārrēķinās par darba stundu.
Žiroskopija. Noskaidrosim to ar nulles žiroskopu palīdzību. Rozrakhunkove nometne ir saistīta ar tās patiesās nometnes unikalitātes koordinātu sistēmu ar virsotni shvidkistyu, jo to izceļ divi pretēji faktori - žiroskopu nulles nobīdes un kritiskā virsotne swidkistyu: . Kā labojumu sistēma (piemēram, pie Makhon filtra) varēja aplūkot tēmēkli, tad režīmā, kad tas piecēlās, tas parādījās. Citiem vārdiem sakot, keruyuchiy kutovіy shvidkost ir informācija par nezināmo apduļķošanos, kas notiek. Toms var zasosuvati kompensācijas novērtējums: mēs nezinām apjukuma lielumu bez vidus, mēs zinām, ir nepieciešams kaut kāds korigučija spļāviens, lai jogs dzīvotu. Pamatojoties uz to, tiek novērtēts nulles žiroskopu novērtējums. Piemēram, Makhona novērtējums ir saskaņā ar likumu
Tomēr jaunā rezultāts ir pārsteidzošs: aplēses sasniedz 0,04 rad / s. Šāda nulles nobīdes nestabilitāte nav sastopama lielākajos žiroskopos. Man ir aizdomas, ka problēma ir saistīta ar to, ka Mahon neizmanto GNSS, bet citus progresīvus sensorus - un visa pasaule cieš ātrāk. Tikai uz vertikālās ass, lai nerīkotos nepareizi, novērtējums izskatās mazāk veselīgs:

Mahony et al., 2008
Akselerometrija. Novērtējiet vairāk salocītā akselerometra nulles nobīdi. Informācija par tiem ir jāceļ gaismā no tієї w kutovoї svidkostі, scho kontroles. Tomēr taisnvirziena Krievijā nulles akselerometra nulles efektu neietekmē nodilums vai sensora bloka uzstādīšanas šķībība jaunajam. Jebkuri akselerometru papildinājumi nedarbojas. Piedeva tiek pielietota tikai griežoties, kas ļauj sadalīt un neatkarīgi novērtēt žiroskopu un akselerometru novirzes. Piemērs tam, kā jūs varat strādāt, ir mans raksts. Bērna ass ir:

Ieklāšanas palīgs: kā ar Kalmana filtru?
Man nav ne jausmas, kādi filtri šeit ir aprakstīti, un, iespējams, ņemšu virsroku pār tradicionālo Kalman filtru, cik ātri vien iespējams, koda kompaktumu un koda pilnību - kam tas smirdums tika radīts. Ņemot vērā vērtējuma precizitāti, tad viss nav tik vienkārši. Es nebiju pārāk tālu, lai izstrādātu Kalman filtrus, it kā tie precīzi atskaņotu filtru ar virtuālo giroplatformu. Majvik arī atnesa labāko no sava filtra yakihos Kalmana aplēses. Tomēr vienam un tam pašam orientācijas novērtēšanas uzdevumam var strīdēties par vismaz duci dažādu Kalmana filtra shēmu, un ādai būs nemainīgs pielāgošanas iespēju skaits. Man nav cita pamata domāt, ka Mahone vai Majvik filtrs ir precīzs. labāko iespējamo Kalman filtri. Un, acīmredzot, kalmanistiskajai pieejai vienmēr zudīs universāluma prestižs: jūs neuzliekat ikdienas stingrus ierobežojumus sistēmas konkrētajam dinamiskajam spēkam, kas tiek novērtēts.