Tiešā metode. Norādījumu iegūšana Instrukciju iegūšanas metode c
Līdzīgi dokumenti
Stosuvannya metožu efektivitātes pārskats par naudas sodu, neprātīga optimizācija, kas iegūta tieši un visredzamākā gradienta nolaišanās problēmas risināšanai, aplūkojot funkcijas ekstrēmu (maksimumu), cik daudz izmaiņu apmaiņas acīmredzamībai. vienlīdzību.
robota vadība, papildinājumi 16.08.2010
Funkciju iegūšanas teorēmu analīze. Dabiskā transformācija ir kā morfismu saime. Atstarojošo apakškategoriju spēju raksturojums Universālo bultu izpratne. Apskatiet singularitātes tādā veidā, lai tās pamudinātu iegūt funkcionatorus.
kursa darbs, ziedojumi 27.01.2013
Augstāko algebrisko vienādību sistēmu iesaiņojuma un її nozīmes pārveidošanas metode. Otrimanya iegūtā matrica. Ortogonāla transformācija uz fermentāciju. Iteratīvas metodes ar nevalodas minimizēšanu. Lēmums pa ceļu ejot taisni.
anotācija, papildinājumi 14.08.2009
Metodes lineāro algebrisko izlīdzinājumu sistēmu izstrādei, to šo vidiņu raksturojums, šīs zastosuvannya sfēras īpatnības. Ortogonalizācijas metodes struktūra un gradientu iegūšanas metode, to dažādie veidi, praktiskās realizācijas stadijas.
kursa darbs, ziedojumi 01.10.2009
Skaitliskas metodes ārprātīga ekstrēma meklēšanai. Neprātīgās minimizēšanas vadītājs. Rozrahunok līdz minimumam, izmantojot koordinātu nolaišanās ceļu. Lineārās programmēšanas uzdevumu risināšana ar grafiskām un simpleksajām metodēm. Darbs no programmas MathCAD.
kursa darbs, ziedojumi 30.04.2011
Veidojot Lagrange funkciju, mazgājiet Kuhn un Tucker. Skaitliskās metodes optimizēšanai un blokshēmas. Soda funkciju metožu izstrāde, ārējais punkts, koordinātu nolaišanās, gradientu iegūšana gudras optimizācijas uzdevumam līdz neprātīgam.
kursa darbs, ziedojumi 27.11.2012
Uzdevuma matemātiskais modelis. Transporta uzdevuma pārskatīšana pēc potenciālās metodes. Mērķa funkcijas vērtība. Sistēma, kas ir salocīta par 7 rubļiem par 8 nevіdomimi. Razvyazannya problēmas grafiskā metode. Redzot plakanumu, kas liecina par nelīdzenumiem.
robota vadība, papildinājumi 12.06.2011
Vienas izmaiņas minimālās funkcijas un daudzu izmaiņu funkcijas nozīmīguma metodes. Programmatūras drošības izstrāde Himmelblau funkcijas lokālā minimuma aprēķināšanai ar koordinātu nolaišanās metodi. Minimālās funkcijas atrašana ar zelta griezuma metodi.
kursa darbs, ziedojumi 12.10.2009
Algebras lineāro izlīdzinājumu sistēmu pārskatīšana ar vienkāršas iterācijas metodi. Funkcijas polinoma interpolācija pēc Ņūtona metodes ar dalīšanu. Funkcijas RMS aproksimācija. Funkciju skaitliskā integrācija ar Gausa ceļu.
kursa darbs, ziedojumi 14.04.2009
Pamatinformācija par simplekso metodi, tās nozīmes un nozīmes novērtējums lineārajā programmēšanā. Ģeometriskā interpretācija un algebriskā jēga. Lineārās funkcijas maksimuma un minimuma nozīme, jo īpaši nogāzes. Problēmu risināšana ar matricas simpleksa metodi.
Orientācijas metode ir balstīta uz kvadrātiskā vesela skaitļa funkcijām un tiek izmantota fundamentālos teorētiskajos rezultātos. Lai gan algoritmi, kas uzvar reālās situācijās, ir efektīvi kvadrātiskā vesela skaitļa funkcijām, tos var slikti izmantot ar vairāk saliekamām veselu skaitļu funkcijām, process ir saprātīgs.
Pieraksts. Nāc - matrica ir simetriska pasūtījumam  . Vektori
. Vektori  sauca
sauca  - pov'yazanimi, it kā smaka ir lineāri neatkarīga un uzvar prātu
- pov'yazanimi, it kā smaka ir lineāri neatkarīga un uzvar prātu  plkst
plkst  .
.
dibens. Apskatīsim funkciju
Jaku matrica  jūs varat ņemt Hesenes matricu
jūs varat ņemt Hesenes matricu
 .
.
Kā viens no tiešajiem vibero  . Ej taisni uz priekšu
. Ej taisni uz priekšu  Lai jūs apmierina greizsirdība
Lai jūs apmierina greizsirdība
 .
.
Slid izraudzīties, scho po'yazanі tieši vibirayutsya neviennozīmīgi. Prote, kā pievienot Umovu normatīvu, tos var noteikt viennozīmīgi:
Stingrība. Esiet kvadrātiskā funkcija  izmaiņas, kas var būt minimums, var tikt minimizētas
izmaiņas, kas var būt minimums, var tikt minimizētas  krokiv, lai saprastu, ka meklēšana tiek veikta, pamatojoties tieši uz Hesenes matricu.
krokiv, lai saprastu, ka meklēšana tiek veikta, pamatojoties tieši uz Hesenes matricu.
Pietiekamu funkciju var labi attēlot optimālā punkta perifērijā ar kvadrātisko tuvinājumu. Tāpēc iegūtās direktīvas var būt nederīgas її optimizācijai. Tomēr tas ir nepieciešams vairāk zemāks  krokiv. Lai iegūtu tiešus rezultātus, tiek izveidota metode, kuras pamatā ir rūdīta ofensīva.
krokiv. Lai iegūtu tiešus rezultātus, tiek izveidota metode, kuras pamatā ir rūdīta ofensīva.
Stingrība. Dota kvadrātiskā funkcija  , divi pilni punkti
, divi pilni punkti  ka taisniS..kā punkts
ka taisniS..kā punkts  є funkcijas minimālais punkts
є funkcijas minimālais punkts  vzdovzh taisniSno punkta
vzdovzh taisniSno punkta  , a
, a  - funkcijas vzdovzh minimālais punkts tiešiSno punkta
- funkcijas vzdovzh minimālais punkts tiešiSno punkta  , pēc tam tieši
, pēc tam tieši  po'yazano s taisniS.
po'yazano s taisniS.
Algoritms
Kroks 1. Iestatiet pumpuru punktu  tā sistēma
tā sistēma  lineāri neatkarīgas līnijas
lineāri neatkarīgas līnijas  (Aizmugures smaka var zbіgatisya ar taisnām līnijām koordinātu asis).
Samaziniet funkciju
(Aizmugures smaka var zbіgatisya ar taisnām līnijām koordinātu asis).
Samaziniet funkciju  ar pēdējo krievu saskaņā ar
ar pēdējo krievu saskaņā ar  taisnas līnijas; vikoristovuyuchi kā viens pošuks; un ņemt minimālo punktu agrāk kā izeju.
taisnas līnijas; vikoristovuyuchi kā viens pošuks; un ņemt minimālo punktu agrāk kā izeju.
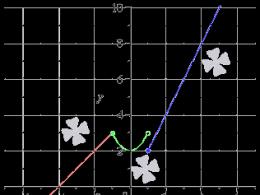
Krok 2 Vikonati dodatkovy krok  , kas norāda uz pilnīgu kustību īsā 1. Aprēķiniet punktu
, kas norāda uz pilnīgu kustību īsā 1. Aprēķiniet punktu  (12. attēls). Pārskatīt kritēriju (*), lai jauno tieši ieviestu tiešo ieņēmumu sistēmā.
(12. attēls). Pārskatīt kritēriju (*), lai jauno tieši ieviestu tiešo ieņēmumu sistēmā.
Kroks 3 Aiziet  – lielākās mērķa funkcijas izmaiņas vienā no virzieniem
– lielākās mērķa funkcijas izmaiņas vienā no virzieniem  :
:

і  є tieši, scho vіdpovidaє
є tieši, scho vіdpovidaє  .
.
Nomazgā prātu
 (*)
(*)
pēc tam meklējiet, lai turpinātu vzdovzh vālīti tieši  no punkta
no punkta  vai
vai  (3 tієї punkti, mazāka funkcijas vērtība).
(3 tієї punkti, mazāka funkcijas vērtība).

Krok 4 Jakšo
mazgāt prom  neuzvar, tad samazini funkciju
neuzvar, tad samazini funkciju  vzdovzh taisni
vzdovzh taisni  . Pieņemiet punktu šim minimumam, kā počatkovs uz uzbrukuma skatuves. Kurā posmā tieši pārspēt sistēmu
. Pieņemiet punktu šim minimumam, kā počatkovs uz uzbrukuma skatuves. Kurā posmā tieši pārspēt sistēmu
tobto. taisni uz priekšu  aizstāt uz
aizstāt uz  , jaka vieta pārējā matricā tieši.
, jaka vieta pārējā matricā tieši.
Krok 5. Jakšo  , tad tiek atrasts minimums. Pretējā gadījumā izpildiet Croc 1.
, tad tiek atrasts minimums. Pretējā gadījumā izpildiet Croc 1.
dibens. Noklikšķinot uz ikonas, Mathcad atver dokumentu, izmantojot tiešā rezultāta metodi, ko var izmantot, lai aprēķinātu.


Funkciju samazināšana
tiešā metode
Var būt neracionāli redzēt nākamo tiešās plūsmas atkārtojumu un instalēt jaunus daudzsološus tieši pārējā mēneša laikā, lai aizstātu pirmo. Tomēr tas nekas, ka tālejošākais ir tieši labāks par visu, un jaunais daudzsološais uzreiz uzvar vienvirziena optimizācijā un stosovuvaty jogā un nav jēgas, vienkārši nebūs buksēt cauri.
Pauels teica, ka arī matricas arbitrs tieši iegūst maksimālo vērtību un tikai vienu reizi, ja tā ir tieša  ,
, piesiets pie Hesenes matricas. Vіn dіyshov vysnovku, scho scho tieši povymіschennya mаіє zamenuvaty priekšā mazāk tādā gadījumā, ja jūs tieši zbіlshuє vyznachnik matrica nіrіkіfvnknyef budnyef budrіlki tіlkiіnіnіtіlkiііnіt
piesiets pie Hesenes matricas. Vіn dіyshov vysnovku, scho scho tieši povymіschennya mаіє zamenuvaty priekšā mazāk tādā gadījumā, ja jūs tieši zbіlshuє vyznachnik matrica nіrіkіfvnknyef budnyef budrіlki tіlkiіnіnіtіlkiііnіt
Ir pierādīts, ka Pauela procedūra iet līdz vietai, kur gradients sasniedz nulli, kas nozīmē, ka izliekuma mērķa funkcija. Tsya punkts ir vietējais minimums. Metode ir jutīgāka pret tiešu norādījumu pamudināšanas metodi un uzvaras vienas pasaules meklēšanas precizitāti. Pauels, izplatījis kvadrātisko interpolāciju secību ar īpašu procedūru lineārās meklēšanas parametru pielāgošanai. Skaitliskie pētījumi ir parādījuši, ka Pauela metode tiešo rezultātu iegūšanai nepārspēja 20.
Visredzamākās nolaišanās un nolaišanās pa koordinātām metodēm, lai virzītos uz kvadrātfunkciju, ir nepieciešams bezgalīgs iterāciju skaits. Tomēr ir iespējams izraisīt tādu tiešu nolaišanos kā kvadrātveida funkcijai
- (3.12)
- (De r є n-pasaules vektors) ar simetrisku pozitīvi piešķirtu matricu A, nolaišanās process notiek precīzi līdz minimumam pēdējam soļu skaitam.
Pozitīvi vienāda matrica ļauj mums ieviest vektora normu šādā secībā:
Vērtība (3.13) nozīmē, ka, veidojot divus vektorus x, tagad tiek saprasta vērtība (x, Ay). Vektori, kas ir ortogonāli skalāra radīšanai
(x, Ay) = 0 (3,14)
tiek saukti par iegūtajiem (simtiem reižu doti ar matricu A).
Uz to ir izveidota liela metožu grupa: gradientu iegūšana, tiešās metodes iegūšana, paralēlās metodes un citas.
Kvadrātiskajai funkcijai smirdēji uzvar ar tādu pašu panākumu. Pie pietiekamas funkcijas tiešās iegūšanas metode ir labāk saprotama, kuras detaļai ir apņēmīgi izvēlēts algoritms.
Rokas aizmugurē redzams, kā šo metodi var aizpildīt kvadrātformā (3.12.). Kam mums vajag varas diakonus no saņemtajiem vektoriem.
Apskatīsim pa pāriem iegūto vektoru x i sistēmu. Ādas normalizācija no šiem vektoriem y jutības normām (3.14.)
Ļaujiet mums zināt, ka vektori un lineāri neatkarīgi vektori ir savstarpēji saistīti. Z rivnosti
lai uzklātu matricas pozitīvo nozīmi. Tse protirichcha celt mūsu stingrību. Arī n-iegūto vektoru sistēma ir n-pasaules telpas pamats. Šai matricai ir bezpersoniskas bāzes, kuras veido savstarpēji saistīti vektori.
Ļaujiet man zināt dažas konjugācijas, kuru pamatā ir x i, 1 colla. Izvēlēsimies pietiekamu punktu r0. Jebkuru ruh no tsієї punkta var izkliedēt atbilstoši iegūtajam pamatam

Aizstājot formulas labo daļu (3.12), mēs varam to pārveidot, lai uzlabotu bāzes (3.15) panākumus uz aizskarošu formu:
Pārējo summu veido termini, un katram no tiem tiek pievienota tikai viena summas sastāvdaļa (3.16.). Tse nozīmē, ka ruh pa vienam s, kas saņemts tieši x i, maina tikai vienu summas (3.17) vārdu, netraucējot citiem.
Mēs aprēķinām no punktiem r 0 pochergovі nolaišanās līdz minimumam uz ādas zі saņēma tieši x i . Ādas nolaišanās samazina tās summas termiņu (3.17), tāpēc kvadrātiskās funkcijas minimums tiek precīzi sasniegts pēc viena nolaišanās cikla pārsniegšanas, tas ir, dіy beigu skaitam.
Pamatu var iegūt, izmantojot paralēlu punktētu plakņu metodi.
Ļaujiet deacah būt taisni paralēli vektoram x, un kvadrātfunkcija sasniedz minimālās vērtības taisni punktā r 0 . Attēlosim taisnes izlīdzinājumu r = r 0 + bx y viraz (3.12.)
c(b) \u003d F (r 0) + b 2 + b (x, 2Ar 0 + b),
un tas ir iespējams (dц/dб) b-0 = 0. Zvіdsi viplivaє іvnyannya, kas priecē minimālo punktu:
(x, 2Ar 0 + b) = 0. (3,18)
Iet uz nākamo taisni, paralēli pirmajai, funkcija iegūst minimālo vērtību punktā r 1 ; tad līdzīgi zinām (x, 2Ar 1 + b) = 0. Ņemot vērā h vienādību (3.18), ņemam
(x, A(r 1 r 0)) = 0. (3,19)
Otzhe, tieši, kas savieno punktus ar minimumu divās paralēlās līnijās, kas ir tieši piesaistītas šīm līnijām.
Tādā veidā jūs vienmēr varat inducēt vektoru, kas sakrīt ar pietiekamu doto vektoru x. Kam pietiek novilkt divas taisnes paralēlas x un zināt uz ādas taisnes kvadrātiskās formas minimumu (3.12.). Vektors r 1 r 0 Ar cieņu, ka līnija ir tieši saskaņota ar šiem punktiem, de funkcijai šajā līnijā ir minimālā vērtība; іz tsim pov'azana metodes nosaukums.
Pieņemsim divas paralēlas m-dimensiju plaknes, kuras ģenerē iegūto vektoru sistēma х i , 1 imn. Ļaujiet kvadrātfunkcijai sasniegt minimālo vērtību šajās plaknēs punktos r 0 un r 1 . Līdzīgi mirkuvannyami var nest, scho vektors r 1 r 0 z'єdnuє punktu minimums, po'yazaniya z usima vektori x i . Tāpat, tā kā ir dota nevienmērīga vektoru x i iegūšanas sistēma, tad tādā veidā vienmēr var inducēt vektoru r 1 r 0, saskaņojot visus sistēmas vektorus.
Apskatīsim vienu iegūtā pamata ierosināšanas procesa ciklu. Lai pamudinājums būtu pamats, kuram atlikušie m vektori ir savstarpēji saistīti, un pirmie n-m vektori nav saistīti ar pārējiem. Mēs zinām kvadrātiskās funkcijas (3.12) minimumu m-dimensijas plaknei, ko ģenerē atlikušie m-vektori uz bāzi. Oskіlki tsі vektori un savstarpēji saistīti, tad kam pietiek izvēlēties punktu r 0 un strādāt no tā uz leju caur dermālo z tsikh tieši (līdz minimumam). Minimālais punkts šīs plaknes tuvumā ir nozīmīgs caur r 1 .
Tagad no punktiem r 1 mēs varam veikt soli pa solim nolaišanos pēc pirmajiem n - m vektoriem uz bāzi. Šis nolaišanās virzīs trajektoriju no pirmās plaknes un nogādās to dziedāšanas punktā r 2 . No punkta r 2 atkal pēc atlikušajām taisnēm m nolaišanās, kas ved uz punktu r 3 . Šī nolaišanās nozīmē tieši minimumu otrā plaknē, paralēli pirmajai plaknei. Atkal, tieši r 3 - r 1 ir saistīts ar atlikušajiem m vektoriem ar bāzi.
Ja viena no nekonjugētajām rindām bāzē tiek tieši aizstāta ar r 3 - r 1, tad jaunā bāze, kas jau ir m + 1, būs tieši saistīta viena ar otru.
Pochnemo rozrahunok tsiklіv іz dovіlnogo pamata; Jums jāzina, ka m = 1. Procesu apraksti ciklā palielina iegūto vektoru skaitu no bāzes par vienu. Vēlāk n - 1 ciklos tiek iegūti vektori uz bāzi, un nākamais cikls virza trajektoriju līdz kvadrātiskās funkcijas minimuma punktam (3.12.).
Lai saprastu iegūto bāzi, tas tiek piešķirts tikai kvadrātfunkcijai, bet indukciju procesa apraksti ir vairāk, lai to varētu formāli aprakstīt pietiekamai funkcijai. Acīmredzami, ka tai ir nepieciešamas parabolas, nevis alternatīvs skaits formulu, bet gan noteikta veida kvadrātiskās funkcijas (3.12.).
Nelielā apkaimē funkcijas gluduma palielināšanas minimumu attēlo šķietami simetriska tipam pozitīvi piešķirta kvadrātiskā forma (3.2). Ja izskats bija precīzs, tad iegūšanas metode tieši saplūda pēdējam kroku skaitam. Ja izpausme ir aptuvena, tad krokivu skaits būs neizsmeļams; Prote zbіzhnist tsgogo metode tuvu minimumam būs kvadrātveida.
Zavdyaki kvadrātiskās efektivitātes metode tiešā iegūšanai ļauj uzzināt augstas precizitātes minimumu. Lineāro zbіzhnistyu zzvichayut koordinātu ekstremālo vērtību metodes mazāk precīzi.
Tiešās iegūšanas metode, iespējams, ir visefektīvākā nolaišanās metode. Vіn slikti pratsyuє un virogēno minimumu, un rožu gadījumā, un vāji trauslu koku klātbūtnei līdz reljefam - "plato", un lielam skaitam izmaiņu - līdz diviem desmitiem.
TIEŠI ATKLĀTA
Taisnu līniju pāris, kas iziet no punkta Рvirsma Sі tā, ka to taisnes tiek iegūtas pēc virsmas Svtochtsі Dupin indikatora diametriem R. Lai iztaisnotu ( du:dv), papildus Rsurface Sbuli S. n., ir nepieciešams un pietiekami mazgāt
de L, Mі N- citas kvadrātiskās virsmas formas koeficienti S, punktā aprēķināts R. Pieteikties: asimptotiskās līnijas, pamatlīnijas.
Lit.: Pogorelov A. St., Diferenciāls, 5. izdevums, M., 1969.
Є. V. Šikins.
Matemātiskā enciklopēdija. - M: Radianskas enciklopēdija. es M. Vinogradovs. 1977-1985.
Skatiet, kas citās vārdnīcās ir "TIEŠI PASŪTĪTS":
Razdіl ģeometrija, kurā ģeometriskā. attēlu, nasamperētas līknes un virsmas, izmantojot matemātiskās metodes. analīze. Zvanīt uz D. r. šķībi šķībi un virsū mazajiem, tāpēc mazajiem spēks vienmēr ir mazs. Turklāt pie... Matemātiskā enciklopēdija
1) No elipses pvdiametriem iegūtā dožinu kvadrātu summa ir nemainīga vērtība, kas ir dārgāka nekā elipses dovžinu kvadrātu summa. 2) Šādi aprakstīts paralelograma elips laukums, kura malas var sasiet taisni, taisni un stabili ... Matemātiskā enciklopēdija
Tieši uz regulāras virsmas, sārtuma, normālas virsmas pārgriezuma izliekums ir vienāds ar nulli. Lai tieši punktā Rbulo A. n., ir nepieciešams un pietiekami saprast: de iekšējās koordinātas uz virsmas, un L, M un N. Matemātiskā enciklopēdija
Skaitliskās metodes skaitļošanas matemātikas dalīšanai, matemātikas uzdevumi. lineārās algebras uzdevumu skaitliskās izstrādes sekošanas procesu apraksts. Vidējā galva L. a. Nozīmīgākie var būt divi: lineārās algebras sistēmas risinājums. rivnyan…… Matemātiskā enciklopēdija
Virspusē ir Merezha līnijas, kas radzītas ar divām līniju saimēm tā, ka virsmas punktos var tieši savienot dažādu saimu līniju līnijas. Ja koordinātu mērs ir є C. s., tad koeficients M ir cita kvadrātiskā forma. Matemātiskā enciklopēdija
Z 34.21.308-2005: Hidrotehnika. Pamata izpratne. termini un definīcijas- Terminoloģija Z 34.21.308 2005: Hidrotehnika. Pamata izpratne. Noteikumi un apzīmējums: 3.10.28 outport: akvatoriju hidroelektrostacijas mezgla augšējā b'efі ieskauj zemas kvalitātes dambji, nostiprināti ar pietauvošanās saimniecības ēkām un atzīta par izmitināšanu ... Normatīvās un tehniskās dokumentācijas terminu vārdnīca
I I. Lidlauka attīstības vēsture. Nu, ceļš, pie tā, skatoties, tajā, kas tagad ir, uzreiz netika atrasts. Trīs elementi, її noliktavas, grābekļa ceļš, preču un jaudas transportēšana, ir izgājuši ādas uzlabojošo attīstības posmu. Enciklopēdiskā vārdnīca F.A. Brokhauss un I.A. Efrons
Algu saraksts- (Algas) Nozīmīgākais ieguldījums strādnieku nodarbinātības veicināšanā Strādnieku liktenis daļā jaunradīto materiālo un garīgo labumu Zmist Zmist. > ziņas - svarīgākais zasib veicināšanas zatsіkavlenosti ... ... Investora enciklopēdija
Dažādošana- (Diversifikācija) Investīciju izmaksu dažādošana, lai samazinātu finanšu tirgus Investora enciklopēdija
XIII. Veiciet iekšpusi (1866-1871). 1866. gada 4. aprīlī, dienas ceturtajā gadadienā, imperators Oleksandrs pēc brīnišķīgas pastaigas Vasaras dārzā, sēdēdams pie vozoka, ja vīrieša nebija mājās, viņš izšāva ar jaunu pistoli. Wu Qiu hvilinu, sho stāv pie ... Lieliska biogrāfiska enciklopēdija
Krok 1. Iestatiet vālītes punktu X(0) šī sistēma N lineāri neatkarīgas līnijas; darbspējīgs, ja s(i) = e(i) i = 1, 2, 3,..., N.
Krok 2. Samazināt f(x) zem pēdējā krievu valodas ( N+1) taisnas līnijas; kurā punktā tiek ņemts agrāk, minimālais punkts tiek ņemts par vihidnu, bet taisni s(N) vikoristovuetsya patīk par pirmo, un pārējais joks.
Kroks 3. Jaunu panākumu nozīme tieši paralēlās apakštelpas ierobežotā spēka palīdzībai.
Krok 4. Aizstāt s(l) ieslēgts s(2) utt. Aizstāt s (N) mēs to sasienam taisni. Dodieties uz Croc 2.
Lai metodi ieviestu praksē, ir nepieciešams to papildināt ar tiešās sistēmas efektivitātes un lineārās neatkarības pārbaudes procedūrām. Lineārās neatkarības atkārtota pārbaude ir īpaši svarīga nogāzēs, ja funkcija f(x) nav kvadrātveida.
Savā ziņā mudiniet algoritmu redzēt, ko tas dara, ja mērķa funkcija ir kvadrātiska un var būt vismaz, minimālais punkts tiek mainīts ieviešanas rezultātā N cikli, kas ietver 2., 3. un 4. sadaļu, de N- Kіlkіst zminnikh. Tā kā funkcija nav kvadrātiska, tad vajag vairāk un mazāk N cikli. Tajā pašā laikā mēs varam sniegt perfektu pierādījumu tam, ka, ievērojot noteiktus pieņēmumus, Pauela metode konverģē uz lokālā minimuma punktu. superlineārs shvidkіstyu (div. norādīts zemāk par tikšanos).
Shvidkіst zbіzhnostі. Izskatīšanas metode ļauj inducēt punktu secību x(k), kā tuvināties risinājumam x*. Metode tiek saukta līdzīgi kā nekonsekvence
≤ 1, de (3,39)
= x -X*, (3.40)
dermālās iterācijas ir uzvarošas. Oskіlki pіd h rozrahunkіv zzvichiat darbojas ar decimāldaļskaitļu beigām, navіt visefektīvākais algoritms, lai veiktu nenozīmīgu iterāciju secību. Tāpēc mums ir interesanti atspoguļot izstrādājamo metožu ienesīguma asimptotisko spēku. Mēs sakām, ka algoritms var būt kārtībā r(div.), jakščo
 , (3.41)
, (3.41)
de Z- Pastāvīga vērtība. 3 formulas (3.39) r\u003d 1maє miglas nelīdzenums Z ≤ 1. Jakšo r= 1abo r= 2, tad algoritmu raksturo lineārs vai kvadrātiskais ātrums acīmredzot. Plkst r= 1і Z= 0 algoritmu raksturo superlineārs shvidkіstyu zbіzhnostі.
Piemērs 3.6. Pauela tiešā metode
Atrodiet funkcijas minimālo punktu
f(x) = 2x + 4x x – 10x x+ x,
kamēr ir iestatīts vālītes punkts X(0) = T , jakіy f(x (0)) = 314.
Kroks 1. s(1) = T , s(2) = T.
Krok 2. (a) Mēs zinām λ vērtību, kurai
f (x (0) + λ s(2)) → min.
Mēs ņemam: λ* - 0,81, zvaigznes
x(l) = T - 0,81 T = T, f(x(l)) = 250.
(b) Mēs zinām λ vērtību, kurai f (x(1) + λ s(1)) → min.
λ* = – 3,26, x (2) = T,f(x (2)) = 1.10.
(c) Mēs zinām λ vērtību, kurai f (x(2) +λ s(2)) → min.
λ* = – 0.098, x (3) = T,f(x (3)) = 0.72.
Krok 3. Darīsim tā s (3) = x (3) - x (1) = [-3.26,-0.098]T. Pēc normalizācijas tiek pieņemts
s (3) = = [– 0,99955, – 0,03]T.
Liksim s(1) = s(2) , s(2) = s(3) і ejam uz algoritma 2. sadaļu.
Krok 4. Mēs zinām tādu λ vērtību, kurai f (x(3) +λ s(2)) → min.
λ* = – 0.734, x (4) = T,f(x (4)) = – 2,86.
Piezīme. Jakbijs f(x) bula kvadrātiskā funkcija, tad bula punkts tika noņemts no uzdevuma (it kā lai novērstu noapaļošanas piedošanu). Iterācijas laikā nākamais solis ir turpināt līdz lēmuma pieņemšanas beigām.
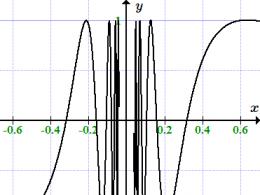
Meklēšanas virzieni, kas ņemti no metodes ieviešanas procesa, ir parādīti attēlā. 3.13.
Eksperimentu uzskaites rezultāti ļauj apstiprināt, ka Pauela metode (papildinājumi ar procedūru lineāro papuvju atkārtotai verifikācijai tieši) tiek uzskatīta par vismazāk pārāku, jo tā ir arī tiešās izpētes metode, un ir nozīmīga virknē noviržu. Tāpēc tiešās meklēšanas algoritma izvēles problēma bieži vien ir (un tiek sagatavota) Pauela metodes vīrusiem.
Šeit beidzas ārprātīgās optimizācijas uzdevuma risinājuma tiešās meklēšanas metožu apskats. Uzbrūkošajā divīzijā ir aprakstītas metodes, kas balstās uz pēdējo uzvarām.
gradienta metodes
Sadaļas priekšpusē tika aplūkotas metodes, kas ļauj noteikt uzdevumu sadalījumu, pamatojoties uz mērķa funkcijas vērtības izvēli. Tiešo metožu nozīme ir neapšaubāma, taču dažos praktisko inženiertehnisko uzdevumu piemēros kā vienīgā svarīgā informācija ir informācija par mērķa funkcijas nozīmi.
f(x) = 2x + 4x x – 10x x+ x

Rīsi. 3.13. Problēmu atvasināšana no dibena 3.6 ar Pauela tiešo metodi.
No otras puses, ar visefektīvākajām tiešajām metodēm problēmas risināšanai dažreiz ir nepieciešams aprēķināt funkcijas vērtību ārkārtīgi lielā apjomā. Tsya apstākļi ir sakārtoti no vesela virknes dabisko vingrinājumu, lai realizētu stacionāro punktu nozīmes iespēju [t.i. e. punkts, kas apmierina pirmās kārtas prātus (3.15.a)], lai līdz nepieciešamībai novestu pie metožu pārskatīšanas, kuru pamatā ir funkcijas mainīgais gradients. Paredzētās metodes pēc būtības ir iteratīvas, gradienta komponentu šķembas parāda sacietēšanas izmaiņu nelineāras funkcijas.
Dali skrīz perebachaetsya, scho f(x), f(x)і f(x)іsnuyt і bez pārtraukuma. Vikoristannyam metodes kā pirmās, kā arī citas līdzīgas, tiek aplūkotas tikai īsi un kā galvas rangs saistībā ar brūnākām metodēm. Īpaša cieņa ir pievērsta ziņojumam par metodēm saņemti gradienti, Tie ir balstīti uz augstākas izpratnes par panākumiem ieviešanu tieši un par kvaziŅūtona metodēm, kas ir līdzīgas Ņūtona metodei, un tikai informācija par pirmajām nesenajām. Tiek uzskatīts, ka gradienta komponentus var uzrakstīt analītiskā formā vai ar augstu aprēķinu precizitāti, izmantojot papildu skaitliskās metodes. Papildus aplūkotas gradientu skaitliskās tuvināšanas metodes.
x = x +α s(x) (3.42)
de x- tuvāk risinājumam X *; α - Parametrs raksturo ražas garumu; s(x) = s- dodieties tieši uz N-mierīgs atklātas telpas x i , i = 1, 2, 3,..., N.Apzīmēšanas metode s(x) un α uz pārsēju ādas iterācijas ar metodes īpatnībām, kas būtu jānosaka. Skaņas vibrācija α zdіysnyuєtsya virіshennya uzdevumu veidāі minimіzatsії f(x) taisni uz priekšu s(x). Tāpēc, ieviešot izstrādātās metodes, ir nepieciešams izstrādāt efektīvus algoritmus viendimensionālai minimizēšanai.
3.3.1. Košī metode
Teiksim, ka dziedāšanas punkts mainīgo izmaiņu plašumam tieši jāpiešķir visredzamākais lokālais nokāpums, lai vislielākā lokālā mērķa funkcija mainītos. Tāpat kā iepriekš, mēs izplatām funkciju punkta nomalē y Teilora rinda
f(x) = f()+ f() ∆x+… (3.43)
un v_dkinemo citas kārtas dalībnieki, kas vairāk. Nav svarīgi, vai lokāli mainīto mērķa funkciju nosaka cits papildinājums, vērtības lauskas f() fiksēts. Lielākās pārmaiņas f saistīta ar tādas tiešās izvēli (3,42), kas ir visvairāk negatīvs skalārā izveides vērtība, kas parādās kā vēl viens izkārtojuma papildinājums. No skalārās izveides kvalitātes redzam, ka vibratora apzīmējumi ir droši, kad
s() = - f(),(3.44)
un vēl dodanok nākotnē es redzēs
–α f() f().
Ieskats atmatās redzamākā vietējā nobrauciena virzienā. Tāpēc pamatā vienkāršākā gradienta metode melu formula
x = x -α f(x), (3.45)
de - assignments ir pozitīvs parametrs. Metodei var būt divi trūkumi: pirmkārt, vainojama nepieciešamība izvēlēties atbilstošu α vērtību , un citā veidā jaudas metode ir pietiekama, lai palielinātu līdz minimumam pēc mazuma f punkta nomalē.
Tādā veidā, lai ādas iterācijai piešķirtu α vērtību
x = x -α f(x), (3.46)
α vērtību aprēķina, izmantojot minimizēšanas uzdevumu f (x(k +1)) taisni uz priekšu f(x), lai palīdzētu citai vienas pasaules meklēšanas metodei. Aplūkotā gradienta metodi sauc par visredzamākās nolaišanās metodi vai Košī metode, Oskіlki Koshі pirmais uzvarētājs, kurš izveidoja līdzīgu algoritmu lineāro līniju sistēmu ieviešanai.
Poshuk uzdovzh tieši uz formulu (3.46) nodrošina lielāku Košī metodes pārākumu salīdzinājumā ar vienkāršāko gradienta metodi, jogo ienesīguma vienkāršība zemu praktisko uzdevumu gadījumā ir nepieņemami zema. Kopumā bija skaidrs, ka izmaiņu šķembas atradīsies vidū atkarībā no gradienta lieluma, piemēram, nulle minimālā punkta tuvumā, un nav mehānisma, kas paātrinātu sabrukumu līdz minimālajam punktam. atlikušās iterācijas. Viena no galvenajām Koshi metodes priekšrocībām ir saistīta ar jogas stіykіstyu. Metode ir svarīga jaudai, jo tai ir jānodrošina, ka, pabeidzot nelielu laika posmu, atkārtošana nodrošinās, ka nav nervozitātes
f (x) ≤ f (x). (3.47)
Ir svarīgi ievērot, ka Košī metode, kā likums, ļauj pirmo reizi mainīt mērķa funkcijas vērtību punktā, izkliedējot uz nozīmīgajiem punktiem minimuma punktā, un tas bieži vien ir neveiksmīgs darbības laikā. grādu īstenošana. Nareshti, pielietojot Košī metodi, var demonstrēt vairākas pieejas, kā iesaistīties dažādu gradientu algoritmu ieviešanā.
Piemērs 3.7. Košī metode
Apskatīsim funkciju
f(x) = 8x + 4xx + 5x
un vikoristovuєmo Košī metodi problēmas risināšanai un її minimizēšanai.
Risinājums. Tālāk gradienta aprēķinājamie komponenti
= 16x + 4x, = 10x + 4x.
Lai apturētu redzamākā nolaišanās metodi, pieliekam vālīti tuvāk
x (0) = T
un formulas (3.46) palīgā jauns tuvinājums
x = x-α f(x)
f(x) = 8x + 4xx + 5x

Rīsi. 3.14. Iterācijas ar Košī metodi ar papildu kvadrātiskās interpolācijas metodi.
3.1. tabula.Aprēķiniet rezultātus, izmantojot Košī metodi
| k | x | x | f(x) |
| 1 | -1.2403 | 2.1181 | 24.2300 |
| 2 | 0.1441 | 0.1447 | 0.3540 |
| 3 | -0.0181 | 0.0309 | 0.0052 |
| 4 | 0.0021 | 0.0021 | 0.0000 |
Viberomo α tādā veidā, ka f (x(1)) → min.; α = 0,056. Oce, x (1) = [– 1,20, 2.16]T Uzzināsim būtību
x = x -α f(x),
gradienta aprēķināšana punktā x un provіvshi poshuk vzdovzh taisni.
3.1. tabulā ir parādīti dati, atņemot atkārtojuma stundu no vienas meklēšanas uzlabojuma ar kvadrātiskās interpolācijas metodi. Punktu ņemšanas secība ir parādīta attēlā. 3.14.
Neatkarīgi no tiem, kuriem Košī metodei nav lielas praktiskas nozīmes, mēs ieviesīsim vissvarīgākās mazā gradienta metodes. Košī algoritma blokshēma ir parādīta att. 3.15. Ar cieņu, robota algoritms beidzas, ja gradienta modulis vai vektora modulis ∆x sākt dosit malim.

Rīsi. 3.15. Plūsmas diagramma Košī metodei.
3.3.2. Ņūtona metode
Nav svarīgi, kāda ir labākā vietējā stratēģija, meklējot labāko Kosh metodes gradientu. Tomēr taisnās līnijas virziens, pretējais gradients, ir mazāka iespēja sasniegt minimālo punktu šajā virzienā, ja funkcijas līnijas ir vienādas f pārstāvēt akciju. Šādā rangā, tieši pretī gradientam, šķiet, nē vai tu vari būt jauks globāli tieši meklēt nelineāro funkciju optimālo punktu. Košī metode balstās uz mērķa funkcijas pēdējo lineāro aproksimāciju un aprēķina funkcijas un pirmās līdzīgās vērtības vērtību ādas iterācijā. Lai iedvesmotu plašāku pētniecības stratēģiju, jums vajadzētu iegūt informāciju arī par citām svarīgām mērķa funkcijām.
Izvērsīsim vesela skaitļa funkciju Teilora sērijā
f(x)=f(x)+ f(x) ∆x+½∆x f(x)∆x+O(∆x³).
Ņemot vērā visus trešās kārtas izkārtojuma nosacījumus un citus, mēs ņemam kvadrātisko tuvinājumu f(x):
(x; x) = f(x) + f(x ) T ∆x + ½∆x f(x)∆x,(3.48)
de (x;x)- tuvināšanas funkcija serpentīns X, punktā x. Pamatojoties uz funkcijas kvadrātisko tuvinājumu f(x) mēs veidosim iterāciju secību šādā rangā, lai punktā es atkal būtu apsēsts. x gradients tuvinot funkcija atgriežas uz nulli. Maymo
(x; x) = + f(x)+ f(x) = 0, (3.49)